





基于光纤通信的汽车照明及信号控制系统
出处:awey 发布于:2011-11-03 16:14:47
摘 要:传统汽车照明、信号控制系统的控制信号通过专用线束传输,不具备自诊断功能。当重要控制信号出现故障时,驾驶员难以察觉,容易造成车祸。针对上述问题,提出了一种基于光纤通信的新型汽车照明、信号控制系统,介绍了控制功能、自诊断功能,以及硬件设计与软件开发。
汽车照明、信号控制系统承担着汽车的照明、信号灯,以及电喇叭、倒车和刹车蜂鸣器等控制任务。传统的汽车照明、信号控制系统采用开关、继电器和专用电子振荡器等进行控制,其控制信号通过专用线束传输,不具备自诊断功能。汽车行驶过程中,当转向灯等重要控制信号出现故障时,驾驶员难以察觉,容易造成车祸[1 ] .
1 系统硬件平台与工作原理
系统由3 片单片机构成的多机系统来实现汽车照明、信号的控制。系统主电子控制单元ECU ( Elec2tronic Control Unit) 将所有输入控制信号集中编码,通过光纤以串行的方式发送到前ECU(安装在汽车前部) 和后ECU(安装在汽车尾部) .前(后) ECU 的并行输出口通过光电隔离器输出控制信号,分别对汽车前部(尾部) 各照明、信号器具进行控制,对汽车前部(尾部) 车灯、信号器具进行实时监控。一旦出现故障,前(后)ECU 立即将故障代码传回主ECU ,主ECU 报警并显示故障代码。系统硬件平台,如图1 所示。
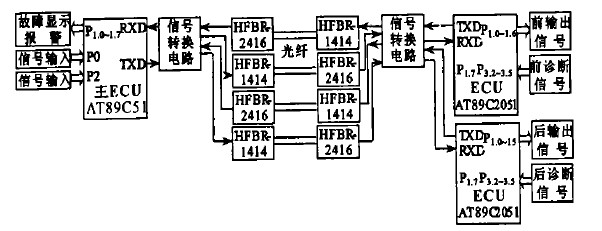
图1 系统硬件平台
1. 1 ECU
系统主ECU 采用AT89C51 ,前ECU、后ECU 采用AT89C2051.AT89C51 内置4KB 可编程Flash E2PROM,128字节RAM,2 个16 位定时/ 计数器,1 个串行通讯口,6个中断源,32 条I/ O 引线,3 级程序存储器保密,静态工作频率为24 MHz.AT89C2051 内置2KB 可编程Flash E2PROM,128 字节RAM,2 个16 位定时/ 计数器,1 个片内模拟比较器,1 个串行通讯口,6 个中断源,15条I/ O 引线,两级程序存储器保密,静态工作频率为24 MHz.
1. 2 光纤发射/ 接收器
光纤发射/ 接收器采用HFBR21414/ 2416.HFBR21414/ 2416发射光波长820 nm ,数据传输速率155MBd ,长传输距离4 km,工作温度范围为- 40 ℃~ +85 ℃,可适用50/ 125μm ,62. 5/ 125μm ,200μmHCS 光纤及ST、SC、SMA 和FC 4 种连接头。HFBR21414光纤发射器内含一个高效光功率激励的铝砷化 光发射器,该光发射器在60 mA 直流电流激励下能向光纤馈入光波长为820 nm 的光功率(12 dBm) .HFBR22416 光纤接收器由一个高效HN 光电二极管和一个低噪声跨阻前置放大器电路组成,光信号经光电二极管转换成模拟电信号,放大后由射极输出器缓冲输出,动态范围达23 dB ,频率响应从直流到125 MHz.
1. 3 工作原理
主ECU 利用两个控制字对所有输入控制信号进行编码存储,这两个控制字的存储格式相同,如图2 所示。
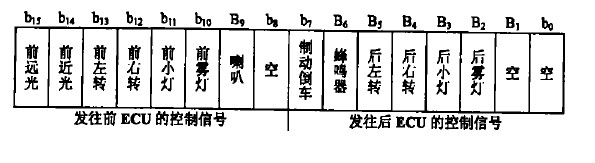
图2 控制信号存储格式
主ECU T0 定时1. 5 ms 中断,产生周期为3 ms 的方波信号控制汽车喇叭。利用T0 中断,软计数250 次,以产生使转向灯每分钟闪烁80 次的周期方波信号。
当输入开关信号变化,或者定时时间到,或者软计数次数到,则置位第1 个控制字的相应位,或对该位求反。主ECU 定时1. 5ms 比较这两个控制字,当这两个控制字不同时,主ECU 通过串口发出更新信号,并用第1 个控制字更新第2 个控制字。
前(后) ECU 收到主ECU 传来的控制信号后,立即与现有控制信号进行比较。若不同,则更新输出控制信号。
1. 4 自诊断
前(后) ECU 的P1. 7、P3. 2~P3. 5、P3. 7 为故障监测端口,分别输入前后照明、信号器具的自诊断信号。
前(后) ECU 每发出一个控制信号,在其故障监测端口就会收到一个相应的反馈信号。比较这两个信号,如果不相同,则说明相应端口的照明、信号器具发生故障,前(后) ECU 则立即向主ECU 发送故障代码。主ECU 收到故障代码后,报警,并显示故障代码。
2 系统软件
系统软件由各ECU 的初始化程序,各ECU 控制子程序,自诊断子程序,以及通讯子程序等组成。
主ECU 与前(后) ECU 的通信利用单片机内置的串口,通过光纤传输控制信号。主ECU、前(后) ECU 分别采用查询、中断的通信方式。系统通过对SCON(串口控制寄存器) 的TB8 赋予1 或0 来区分发送的是地址帧还是数据帧。主ECU 首先发出地址帧,被寻ECU返回本机地址。在判断地址相符后,主ECU 发出控制命令,被寻ECU 向主ECU 返回自己的状态。若被寻ECU 状态正常,主ECU 开始发送或接收数据。主ECU与前(后) ECU 的通信子程序流程如图3 所示。
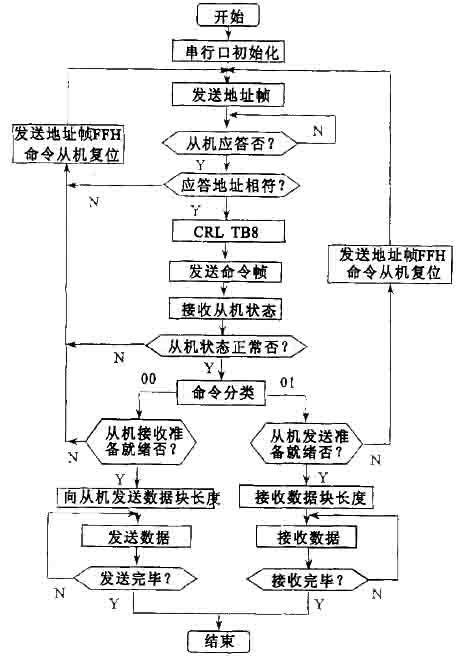
图3 通信子程序流程
3 结束语
该系统的新颖之处在于采用3 片单片机,通过光纤传输编码控制信号,具备自诊断功能。采用光纤取代传统线束,成本低,抗干扰能力强,控制效果好。
参考文献:
[1]. SMA datasheet https://www.dzsc.com/datasheet/SMA+_1054310.html.
上一篇:汽车灯具道路照明仿真显示
下一篇:无线遥控智能照明系统
版权与免责声明
凡本网注明“出处:维库电子市场网”的所有作品,版权均属于维库电子市场网,转载请必须注明维库电子市场网,https://www.dzsc.com,违反者本网将追究相关法律责任。
本网转载并注明自其它出处的作品,目的在于传递更多信息,并不代表本网赞同其观点或证实其内容的真实性,不承担此类作品侵权行为的直接责任及连带责任。其他媒体、网站或个人从本网转载时,必须保留本网注明的作品出处,并自负版权等法律责任。
如涉及作品内容、版权等问题,请在作品发表之日起一周内与本网联系,否则视为放弃相关权利。
- LED 手电筒控制器/驱动器参考设计2023/9/13 16:18:33
- 在 LED 照明和 LCD 背光设计中实现最高效率2023/7/17 15:35:18
- ADALM2000实验:LED作为光传感器2023/5/24 16:33:23
- 如何使用 LED 作为光传感器2023/1/31 15:53:50
- 灯光和 LED自动双输出显示2023/1/11 17:24:36



