





将马达驱动器连接至PWM源的设计方法
出处:liqimcu 发布于:2011-03-14 14:50:59
如何将PWM逻辑信号源连接至电池供电的马达驱动器是我们面临的一道难题。本文介绍了将马达驱动器连接至PWM源的设计方法,其中包括相关方程式与组件选择指南。该方法所采用的电路包括具有度与敏感性分析的示例。
将马达驱动器连接至PWM源
LM4570是一种偏心旋转质量(ERM)与线性谐振激励(LRA)马达驱动IC,适用于移动电话及其它便携式媒体设备。本文的设计详细说明了将LM4570连接至PWM源的设过程。
虽然LRA马达是由交流双极型波形以接近LRA的谐振频率驱动,但ERM马达主要由直流电压驱动。由于需要采用直流电,因而可能不会出现交流耦合电容器与驱动器IC的输入端串联。
设计与驱动器IC连接的PWM接口需要大量数学知识以确保运算正确。
设计该电路的步是确定所需的增益。PWM源可以提供下列电压电平:
式1:

其中VIN(PEAK)是PWM源可以提供的单端峰值输出电压,VLOGIC是PWM逻辑高电压。如果PWM源可达到0%和100%的占空比,请使用式1。如果PWM源达不到0%与100%的占空比,则请使用式1a,因为需要按照该式相应地减小VIN(PEAK):
式1a:

其中DC(MAX)与DC(MIN)分别为PWM源的与占空比。请选用DC(MAX)或DC(MIN)使得能够产生VIN(PEAK)项,以确保获得对称的摆幅。
下一步是决定流经ERM马达所需的峰值输出电压VOUT(PEAK)。为了在所有电池电压下都实现一致的操作,可以将此值设置为3V或更低,也或者将其设置为4.2V以便在电池电量充足的条件下获得超速驱动。必须依照ERM马达规格来检验峰值输出电压,以确保其幅度与持续时间不超过ERM马达制造商规定的规格。我们可以利用VOUT(PEAK)与VIN(PEAK)计算出系统增益:
方程式2:

其中,“增益(Gain)”是从单端PWM源到桥接式负载(BTL)放大器输出端所需的增益。
有关图1中电路所需增益的分析表明BTL输出端的2X增益需要校正,电阻可通过下列式子来计算:
式3:

简易的方法是将RF选为200k,然后计算出RG1与RG2的和。将RG分为两个电阻器是为了允许加入一个旁路电容器CF,以便形成一个一阶低通滤波器。这个低通滤波器可防止来自PWM信号的高频内容免受放大器及ERM马达的辐射。将RG1与RG2选为基本相同的值,即可利用它们的和,并通过式3计算出所需的增益。低通滤波器的截止频率则可通过下列式子来计算:
式4:

其中f-3dB是低通滤波器的截止频率,通常设置为2kHz至5kHz。
设计该电路的步骤是为REF2正确增加偏压(请参阅图1)。必需这样做的原因是由于PWM源的平均直流电平(二分之一VLOGIC)不同于输出端的平均直流电平(二分之一VBATTERY的变化值)。选择图1中的电阻R1与R2即可完成此操作。请注意,REF1引脚的戴维南(Thevenin)阻抗约为10k,因此我们将选定R2约等于200k,以使加载影响可以忽略。偏压的计算式如下所示:
式5:

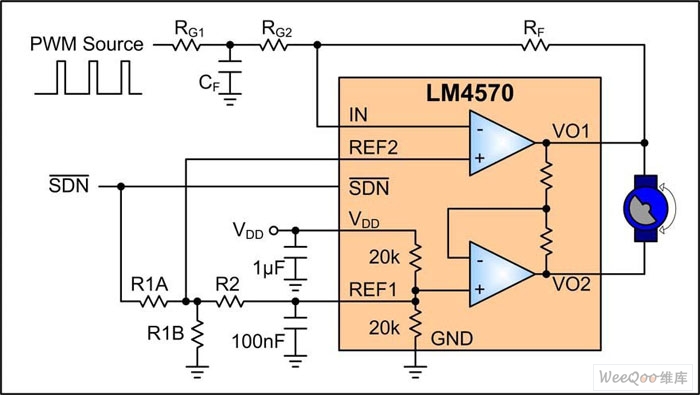
图1:具有PWM接口的LM4570马达驱动器
其中R1是与并联的R1A及R1B(形成这两个电阻器的分压)等效的阻抗。同样,假设PWM输入端的占空比为50%,且输出端与VDD/2平衡,则可得出IN端的电压计算式:
式6:

显而易见,式5与式6在形式上实际是相同的,因此我们可以发现,只需使R2等于RF,并使R1A与R1B为RG值的两倍即可。使用对称电路的一个好处是从计算式子中去除了VDD项,从而使得此电路对电池电压的变化不再敏感。
为了测试这些计算式,我们将使用具有下列参数的示例:VLOGIC=1.5V,VOUT(PEAK)=3.0V
为获得上述值,我们需要“增益”达到4。将RF选为200k并使用式3即可计算出RG等于100k,或RG1与RG2等于49.9k。由于这两个部分是对称的,将R2选为200k并再次使用式3即可计算出R1等于100k,或R1A与R1B等于200k。为了*估该电路的性能,我们对0%至100%的输入端占空比进行参数扫描,同时将电池电压从3.0V逐步增加至3.6V,直至4.2V。此外,我们使用蒙地卡罗(Monte Carlo)分析法检测电阻值以判断其敏感性(结果如图2中所示)。

图2:模拟结果
如图2中所示,VO1与VO2两个输出端相互之间互补。请注意,这两个信号在50%占空比点或输入端上的0.75V处永远相交于零。即使当电池电压在其可用范围内变化时,也会在二分之一电池电压处相交。
图2中的模拟也是电阻器公差为1%的蒙地卡罗扫描。如图中所示,每条走线略微变宽,这表示仅对性能产生可以忽略的影响。
如图2中所示,VO1与VO2两个输出端相互之间互补。请注意,这两个信号在50%占空比点或输入端上的0.75V处永远相交于零。即使当电池电压在其可用范围内变化时,也会在二分之一电池电压处相交。
图2中的模拟也是电阻器公差为1%的蒙地卡罗扫描。如图中所示,每条走线略微变宽,这表示仅对性能产生可以忽略的影响。
版权与免责声明
凡本网注明“出处:维库电子市场网”的所有作品,版权均属于维库电子市场网,转载请必须注明维库电子市场网,https://www.dzsc.com,违反者本网将追究相关法律责任。
本网转载并注明自其它出处的作品,目的在于传递更多信息,并不代表本网赞同其观点或证实其内容的真实性,不承担此类作品侵权行为的直接责任及连带责任。其他媒体、网站或个人从本网转载时,必须保留本网注明的作品出处,并自负版权等法律责任。
如涉及作品内容、版权等问题,请在作品发表之日起一周内与本网联系,否则视为放弃相关权利。
- 串联电路与并联电路的区分2024/4/25 17:15:00
- 查找隔离栅极驱动器的峰值电流2024/4/25 17:07:48
- 使用 GaN IC 离线电源的大容量电容器优化2024/4/24 17:30:57
- 并联电压电池2024/4/23 17:45:00
- 运算放大器压摆率和上升时间解释2024/4/22 16:16:53



