





在TMS320F2812基础上的高智能变送器设计
出处:chenhongen 发布于:2011-08-26 12:43:07
针对工业应用中使用传感器测量参数,传感器信号较弱,不适合远距离传输,且非线性效果不理想,达不到较高要求的问题,提出一种基于TMS320F2812的智能变送器设计方案。该设计以32位TMS320F2812为控制器,采用MAX1400进行A/D转换,再将测量数据进行初步处理后利用TMS320F2812内部集成的eCAN模块与上位机进行通信。结果表明:该智能变送器的变送实际接近0.05级,总功耗控制在4mA以内。
1 系统组成
智能式变送器是由传感器和微处理器(微机)相结构而成的。它充分利用了微处理器的运算和存储能力,可对传感器的数据进行处理,包括对测量信号的调理(如滤波、放大、A/D转换等)、数据显示、自动校正和自动补偿等, 微处理器是智能式变送器的。它不但可以对测量数据进行计算、存储和数据处理,还可以通过反馈回路对传感器进行调节,以使采集数据达到。由于微处理器具有各种软件和硬件功能,因而它可以完成传统变送器难以完成的任务。所以智能式变送器降低了传感器的制造难度,并在很大程主上提高了传感器的性能。
变送器输出为标准信号的传感器。这个术语有时与传感器通用,变送器将传感信号转换为统一的标准信号:0/4-20mADC,1-5VDC,0-10VDc,变送器——遵循一个物理定律(或实验数学模型)将物理量的变化转化成4-20mA等标准信号的装置。变送器种类很多。总体来说就是由变送器发出一种信号来给二次仪表使二次仪表显示测量数据。变送器除有传感的功能之外还有放大整形的功能,输出为标准的控制信号。如:4-20mA
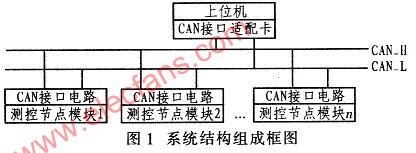
基于eCAN现场总线技术的智能变送器由上位机和智能测控节点构成。位于监控现场的上位机采用通用计算机(PC)或工控机(ICP),在ISA扩展槽使用1块总线通信适配卡,使上位机具有总线通信功能;而位于工业现场的多个智能测控节点采集现场数据。图l为系统组成框图。
2 eCAN智能变送节点的硬件设计
智能变送器节点具有现场数据采集、控制以及与CAN总线通信功能。节点是以TMS320F2812型DSP为,利用其内部集成的eCAN模块进行通信。其硬件电路由4部分组成:单片机微控制器电路、数据采集电路、通信接口电路以及现场监控电路。其主要应用电路如图2所示。
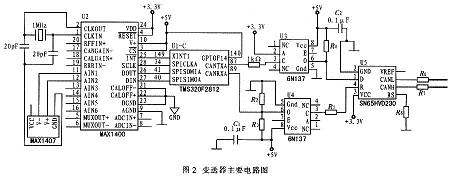
TMS320F2812通过SPI串行接口与MAXl400连接,数据经过处理后,通过光电隔离和电源隔离实现CPU单元的隔离保护,提高通信过程的抗干扰能力。
2.1 单片机微控器
本装置的器件为TMS320F2812。TMS320F2812 DSP内部集成有eCAN模块,完全兼容CAN2.0B协议,是TI公司新一代32位内部结构的CAN控制器。该器件还集成有多种先进的外设,为控制领域的应用提供了良好的平台。TMS320F2812型DSP提高了运算(32位)和系统的处理能力(达到150 MI/s)。该系列器件还集成有128 KB的Flash存储器,4KB的引导ROM,数学运算表及2 KB的0TPROM,从而大大改善应用的灵活性。
2.2 数据采集
传感器模块是实现eCAN通信的通信终端设备之一。上位机的控制命令信息由微处理器处理后,利用传感器进行数据采集或对其进行参数设置。通常输入传感器的信号幅值很小,而且混杂干扰信号以及噪声。为了方便后续处理,首先要将信号整形成具有特性的波形,有时还需要将信号线性化。本装置可以直接与现场各种传感器连接,然后通过屏蔽双绞线与上位机双向数据传输。
在调试中采用半导体压阻传感器。为提高满量程输出,减少零点漂移和提高线性度,通常把感压电阻连成惠斯登电桥,每个桥臂电阻都比较大,一般为2 kΩ。采用恒流源供电,这种方式的优点是电桥的输出与桥臂电阻无关,同时采用双电源供电,所以可进一步减小对传感器的非线性和温度传感器输出灵敏度的影响。
2.3 通信接口
TMS320F2812内部集成有eCAN,可以方便的接入到CAN总线系统中。因此,在设计中不必外加CAN控制器实现CAN总线底层协议,外部只需连接CAN总线驱动器即可实现CAN接口。
这里选用SN65HVD230收发器,可提高系统的瞬间抗干扰能力,增大通信距离,保护总线,降低射频干扰,实现热防护等。6N137系列器件是高速光耦,实现TMS320F2812和物理总线间的光电隔离,降低由于不同节点的高共模电压引起的串扰,甚至对器件的损坏,进而提高系统的可靠性,其通信速率可高达10 Mbit/s,完满足CAN总线通信需要。
因为DSP是+3.3 V供电,而SN65HVD230内部的比较器需要5 V供电,所以在接收端连接有R2和R3实现电平转换。
2.4 现场监控电路
该电路主要显示节点的工作状态和被控对象的测量值,并根据设置对被控对象进行控制,该电路是由液晶显示器、输出驱动器件等组成。
3 系统软件设计
系统软件设计是整套装置的重要组成部分。本装置的软件设计是在CCS集成开发环境中使用C语言开发的。CCS是TI公司提高的功能强大的集成开发环境,可提供环境配置、源文件编辑、程序调试、跟踪和分析等工具,在软件环境下完成编辑、编译链接、调试和数据分析等工作。
3.1 主程序
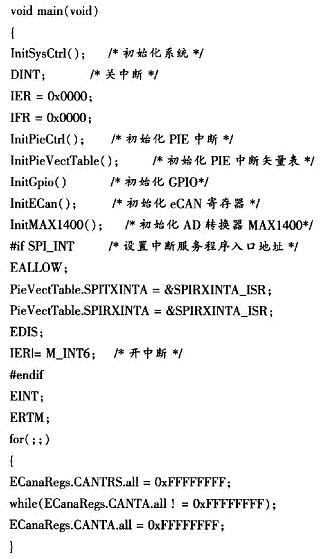
智能变送器的main函数软件代码如下:
3.2 A/D转换模块软件设计
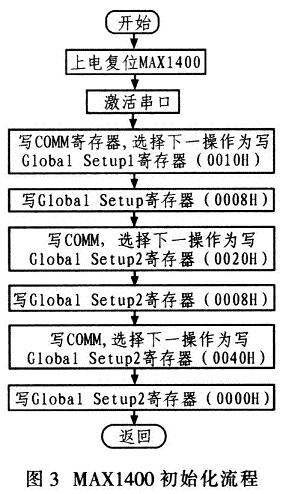
在对MAXl400进行操作时,首先应对其初始化。若不初始化,而直接读取A/D转换的数据,MAXl400将按其内部各寄存器上电复位时的缺省值进行转换。InitMAXl400()的程序流程如图3所示。
分别用软件控制MAXl400的DRDY,CS,SCLK,DIN和DOUT5个引脚的状态,从而实现对它的操作,MAXl400的读写按照严格的时序进行。
主程序中SPIRXINTA_ISR、SPIRXINTA_ISR分别为SPI输入、输出子程序。
Measure()子程序是TMS320F2812对A/D转换器采集后的数据进行处理的过程。当SPISTS.SPINTFLAG=1时,CPU将SPIRXBUF中的值存储到Sci_VarRx[i]数组中,MAXl400是18位,而TMS320F2812为16位处理器。所以每一个采样值要占2个存储空间。测量结果滤波采用中位值平均滤波法,即每个测量值采样10次,去除值和值,其余8个值取算术平均值。
3.3 eCAN通信模块软件设计
在使用eCAN模块之前首先必须对其内部寄存器进行初始化设置。InitECan()包括:1)为正确配置2个引脚CANTX和CANRX,因为这两个I/O口均为复用口。2)初始化位定时器,位定时器CANBTC包括CAN控制器的通讯波特率预分频器BRP、同步跳转宽度SJW、采样次数SAM和TSEGl、TSEG2。3)初始化邮箱,邮箱初始化主要设置邮箱的标识符、控制域以及对相应的邮箱赋初值。
4 结束语
以TMS320F2812和MAXl400为、基于eCAN技术的智能变送器,集转换、计算、通信等功能于一体,具有高、体积小、功耗低的特点。将数据经eCAN总线传输至上位机,提高了工业仪器的可靠性及灵活性,为工业现场的集中控制提供了较好的硬件平台。
上一篇:解析运放式射频放大器
版权与免责声明
凡本网注明“出处:维库电子市场网”的所有作品,版权均属于维库电子市场网,转载请必须注明维库电子市场网,https://www.dzsc.com,违反者本网将追究相关法律责任。
本网转载并注明自其它出处的作品,目的在于传递更多信息,并不代表本网赞同其观点或证实其内容的真实性,不承担此类作品侵权行为的直接责任及连带责任。其他媒体、网站或个人从本网转载时,必须保留本网注明的作品出处,并自负版权等法律责任。
如涉及作品内容、版权等问题,请在作品发表之日起一周内与本网联系,否则视为放弃相关权利。
- BiCMOS 运算放大器的知识2024/4/16 17:41:17
- 模数转换 – 性能标准2024/4/8 16:37:02
- 解析 PWM (DAC) 性能:第 4 部分 – 非均匀占空比组2024/3/28 17:23:37
- 了解运算放大器的输出信号摆幅2024/3/18 16:29:20
- 模拟和数字传感器和转换器2024/3/7 16:39:16



