





完美的时序:用抖动与相位噪声测量做时钟分频
出处:EDN 发布于:2012-01-30 14:31:11
当测量超低抖动的器件与设备时,工程师们必须时刻问一个问题:测得的值是来自DUT(待测设备),还是来自测试设备。工程师们也总在寻找一些能扩展手头设备能力的方法。本文描述了一些实用的方式,用于将较高频率VCO(压控振荡器)的时钟信号做分频处理。
大多数用于测量抖动的现代设备都可以划分到两大类中的一个:时域或频域。时域设备通常是一种高速数字示波器的形式,有高的单次采样带宽。频域设备一般的形式是频谱分析仪、带相位噪声测量功能的频谱分析仪,或相位噪声分析仪。这两大类中,每一类设备都有自己的优点与缺点。不过,它们测量的都是相同现象,只是采用不同方法。
逐周期的峰值抖动是在一个固定数量周期内(一般是1000个或10000个),逐个相邻周期之间的差值。当需要限制频率上的突变大小时,就需要使用它。例如,当驱动一个PLL(锁相环)时,可能希望限制频率中的瞬时变化大小,以确保下游PLL保持锁定(图1)。
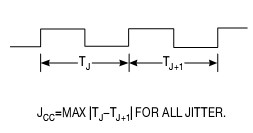
图1,当驱动一只PLL(锁相环)时,可能希望限制频率中瞬变的大小,以确保下游PLL保持锁定。
峰峰周期抖动是在某个观测窗内(同样,一般是1000个或10000个周期),所有时钟周期中时钟周期与时钟周期之间的差值(图2)。这是一个确保数字系统中触发器建立与保持时间的有用规格。"峰峰"的意思是指测量中,和采样周期值之间的差值。
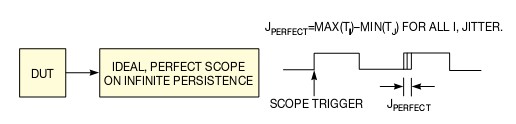
图2,峰峰周期抖动是一个观察窗口内(通常是1000个或10000个周期),所有时钟周期中,时钟周期与时钟周期之间的差值。
TIE(时间间隔误差)抖动(或叫累积抖动,也叫相位抖动)是在所有时钟周期上与理想时钟周期的实际偏差(图3)。它包括了在所有抖动调制频率上的抖动,通常用于WAN(广域网络)的时序应用,如SONET(同步光网络)、同步以太网,以及OTN(光传送网络)。
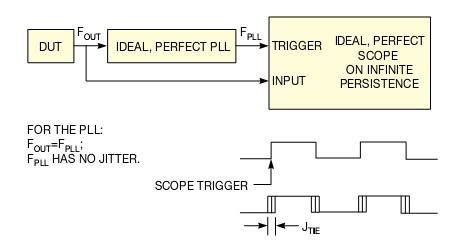
图3,TIE抖动是整个时钟周期上与理想时钟周期的实际差值。
可以建立各种类型的抖动统计,如rms(均方根)、峰峰、逐周期、周期,以及TIE抖动,不过有些更常用。当采用峰峰统计方法时,采样数必须足够大,才能提供可信的测量。这种测量通常要包含1000至10000个采样。
时域设备可以直接测量峰峰、逐周期、周期以及TIE抖动。这种测量方案能够用于测量低频时钟或载波信号的抖动。在数据后处理时采用FFT(快速傅里叶变换)、数字滤波器以及其它技术,就可以对一个频率段上的相位噪声值做积分,生成rms相位抖动值。时域设备在测量数据相关抖动时优于频域系统,因此可用于具有SERDES(串行器/解串器)技术的高速串行链接。
频域设备无法直接测量峰峰、逐周期或周期的抖动;它原生的能力是测量一个给定频段上某信号的rms功能。频域设备还难以测量与数据相关的抖动。然而,高质量频域仪器的本底噪声低于时域设备,因此,对于没有数据相关抖动的超低相位噪声时钟信号测量,频域设备就是选择(表1)。
由于本文的中心是低抖动时钟信号的测量问题,因此省略了对时域设备的进一步讨论,只是提示大家,在从一种抖动测量转到另一种测量时,可以采用各种数学估算与变换方法。例如,用一个波峰因数和所需要的BER(误码率),就可以在峰峰与rms抖动之间来回换算。另一个例子是用一个时域数据的FFT,提供频域信息与滤波。不过,多数这类技术都要依赖于数学模型,这些模型可能在多数情况下有很好的近似,但有局限。因此,只能特别小心地使用它们。
有一个值得进一步研究的问题是时钟(或载波)频率对抖动测量的影响。直觉上,由一个理想分频器切分的时钟信号在其输入与输出端都有相同的时钟沿抖动(图4)。在图4中,上方频率为FO的抖动信号通过一个完美分频器除以2,产生一个FO/2的时钟频率。两个信号有相同的抖动JO.注意,较低时钟信号的抖动能量是较高时钟信号的一半,因为在给定的时间间隔内,其边沿减半。
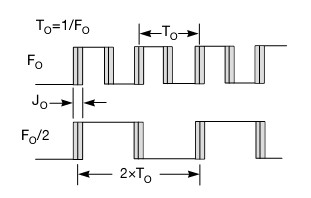
图4,直觉上,一个理想分频器对一个时钟信号分频后,分频器前后有相同的时钟沿抖动。
表1,时域仪器-频域仪器之间的差异

对大部分器件来说,两个时钟信号有相同JO的直觉是正确的,虽然事实上,一个被2除的时钟信号的相位噪声要比原时钟信号的相位噪声低6dB.注意对于除以2的情况,6dB=20×log2.
下面的例子给出了相位噪声与抖动被2除的效果。这些测量采用了一只Silicon Laboratories的Si5324 PLL器件(图5)。注意,高速VCO对输出时钟做再同步,而不管终的输出频率,这意味着对所有可能的分频器值,边沿的形状与位置都应是相同的。不同的应该是在给定时间间隔内出现的少数几个时钟边沿。虽然存在一些重新定时噪声,但它对所有分频器值都是一样的(图6)。
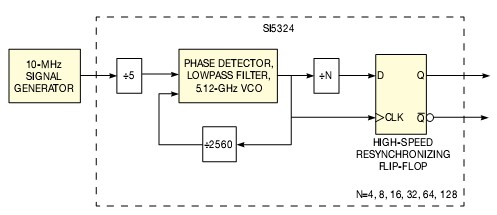
图5,测量采用了Silicon Laboratories的Si5324 PLL器件。
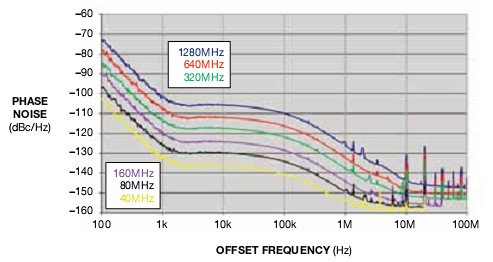
图6,高速VCO重新同步输出时钟,而与终输出频率无关,这意味着对所有可能的分频值,边沿形状与位置都应相同。的区别应是在给定的时间间隔内,出现较少的时钟边沿。
图中的六根曲线基本相同,但垂直方向相差6dBc/Hz.对所有偏移频率与分频器值,这6dB的间隔都相对恒定,只有一个或两个例外。在图的右侧,时钟(或载波)的偏移为,曲线之间的相对垂直偏移被压缩。当时钟频率降低时,压缩也增加。当时钟频率和相位噪声曲线值减小时,这个压缩也变得更明显。出现压缩的原因是,Agilent技术公司E5052B型信号源分析仪的本底噪声接近于Si5324 IC的相位噪声或抖动产生值。因为Si5324的超低抖动与低载波频率相结合的效应,才使本底噪声成为一个问题。表2给出了六张图各自的抖动值,抖动从100Hz~20MHz做积分,所有抖动值均为飞秒rms.
注意当输出频率降低时,抖动会略微增加,这证明了,输出抖动是一个相对恒定的值,尽管相位噪声曲线之间有6 dB的分离度。在输出频率上,抖动增加的速率变得更明显。下面让我们看看两种rms相位噪声值的增长。
本底噪声,相位噪声
在低时钟频率下,仪器的本底噪声可能成为极低抖动时钟相位噪声测量的限制性因素。某种程度上,你测量的是自己的设备,而不是DUT.即使当时钟频率降低时,相位噪声曲线单调地减小,rms沿抖动也几乎保持恒定不变,因为相位噪声积分是用时钟周期来改变rms抖动值的大小。
为演示这种情况,考虑对相位噪声积分,产生一个rms抖动值的过程。大多数现代相位噪声设备都会产生一个有两栏的文件,通常是一个CSV(逗号分隔值)文件。其中一栏列出了与时钟(或载波)频率偏差的频率值,单位为赫兹。另一栏则列出了在偏移频率处,参照每赫兹载波的相位噪声值(分贝)。因此,这些栏中包含的各对数据点描述了对时钟频率一个确定偏移处的相位噪声。用方程:线性值=10(dBc/Hz)/10将参照每赫兹载波的分贝值转换为线性值后,对所有频率偏移点的曲线下面积求和做积分。
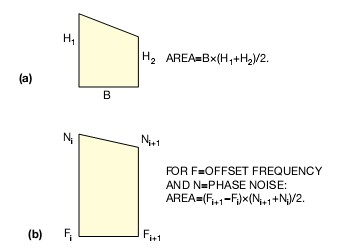
图7,将所有梯形面积求和,就获得了曲线下的面积。将结果乘以2,就确定了终的rms抖动值。
图7中一块梯形面积的方程用于寻找两个相邻数据点对所描述的区域。将所有这些梯形面积加起来,就找到了曲线下的面积。终的rms抖动值由两个因数对结果的缩放而决定:值的来源是,数据取自一个单边带;然而,rms抖动被假设为双边带的。假设相位噪声的两个边带对时钟频率为对称,通常是安全的。这种情况下,由于一个限幅放大器抑制了AM(幅度调制),而通过FM(频率调制),确保了对称的边带,因此就更加安全(图8)。
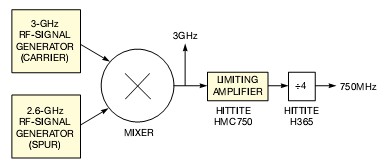
图8,限幅放大器抑制AM,而让FM通过,确保了对称的边带。
表2, 不同分频值的RMS抖动值

另外一个缩放因素用于转换总面积,使之不再用UI(单位间隔),而是用时间单位。这个因数在相位噪声值变化时,将rms边沿抖动值保持为相对恒定。rms抖动的方程如下:

其中,FC?是时钟频率,Ni?是第i项对每赫兹载波的相位噪声(分贝),而Fi?是第i项的偏移频率。
混叠
混叠是时钟频率降低时,rms抖动值增加的另一个原因。相位噪声图的上半部分向下混叠到新的较低频相位图上。由于相位噪声通常略高于时钟或载波频率,并随与时钟频率的偏移增加而减小,因此只有少量相位噪声被混叠。但是,当被大数除时,这个效应就会累积,变得明显。例如,图1中1280与640MHz曲线之间的差在整个图上都是恒定的6dB.于是,你会预期,表2中的两个曲线增加的rms抖动值应整体混叠,而不是仪器的本底噪声。
图9至图13中的频谱与相位噪声图显示了混叠情况。这些例子中的信号都使用AM来演示混叠,而在一个典型应用中它们是不希望出现的。图9与图10表示的是3GHz信号的频谱与相位噪声图。图中显示了在3GHz时钟频率上下400MHz频率的对称尖刺。当频谱显示两个相等的边带时,同一信号的相位噪声图包括了它们从一个3GHz载波进入一个毛刺400MHz的效应。然后,一个四分电路对3GHz信号做分频,产生750MHz.
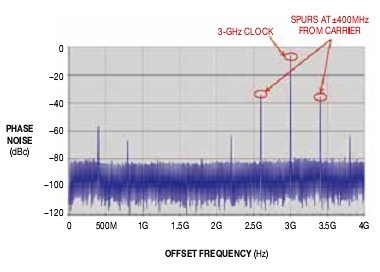
图9,对称毛刺以400 MHz频率出现在3 GHz时钟频率的上下方。

图10,当频谱显示两个相等边带时,相同信号的相位噪声图将其效应结合到3 GHz载波的一个400 MHz尖刺内。然后一个四分电路将3 GHz信号分频,生成750 MHz.
图11与图12显示了来自四分电路的750MHz信号频谱与相位噪声图。作为除以4的结果,2.6GHz和3.4GHz的尖刺下混叠到350MHz的边带尖刺。注意350MHz是一个频率值,同样来自750MHz载波的400MHz,以及来自3GHz载波的2.6GHz.为进一步说明混叠,750MHz信号再分频为375MHz.图13中25 MHz的尖刺是图11中350MHz的尖刺混叠;即,25MHz=375MHz-350MHz.

图11,2.6和3.4 GHz的尖刺混叠到350 MHz的一个边带尖刺。
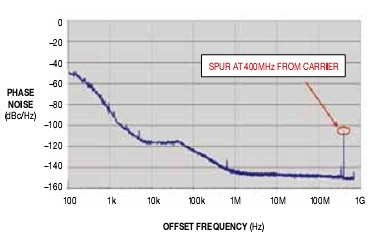
图12,350MHz频率值等同于750MHz载波的400MHz,以及来自3GHz载波的2.6GHz.
如上所见,当测量低频率值的低抖动时钟时,仪器的本底噪声可以成为一个限制因素。当一个较高频时钟被分频为待测时钟时,可以减小分频器的值,以便在较高频率处测量。不过,这种常用技术从较高频抖动成分中消除了抖动的贡献量,它可能已因分频而混叠。虽然得到的rms抖动值可能被人为压低,但对于远离拐点的、相位噪声相对较小的应用,这种方案是可以接受的。当测量有大量抖动的低频时钟时,应使用时域设备,因为可以在实际期望的输出频率上做测量,而无论时钟频率有多低。

图13,25MHz尖刺是图11中350MHz尖刺的混叠。
版权与免责声明
凡本网注明“出处:维库电子市场网”的所有作品,版权均属于维库电子市场网,转载请必须注明维库电子市场网,https://www.dzsc.com,违反者本网将追究相关法律责任。
本网转载并注明自其它出处的作品,目的在于传递更多信息,并不代表本网赞同其观点或证实其内容的真实性,不承担此类作品侵权行为的直接责任及连带责任。其他媒体、网站或个人从本网转载时,必须保留本网注明的作品出处,并自负版权等法律责任。
如涉及作品内容、版权等问题,请在作品发表之日起一周内与本网联系,否则视为放弃相关权利。
- cps是什么意思?cps的含义_cps的特征2024/4/16 17:56:11
- 你所知道的DCS系统都有哪些?2024/4/16 17:50:53
- 煤矿人员定位系统的功能及重要性分析2024/4/16 17:43:54
- 什么是冗余?2024/4/15 17:33:02
- linuxfind命令详解2024/4/15 17:27:22



