





基于东芝Cortex M3处理器的变频冰箱参考方案
出处:ipman 发布于:2012-06-20 10:26:31
以传统开关控制的电机驱动方式消耗了近40%的电力,针对电机驱动效率的改善要求在现今化的节能浪潮下也越来越受到众多关注,国家新公布的"节能产品惠民工程"再将空调、洗衣机、家用电冰箱列为补贴对象。基于变频方式的电机驱动控制尽管可有效的提高能效比,但复杂的设计却是开发人员必须面对的一个不小挑战,而且为了辅助复杂的运算,此类方案多会使用一些昂贵的处理器,如数字信号控制器。东芝半导体基于ARM Cortex-M3 内核集成矢量控制引擎(Vector Engine)模块的TMPM374 微控制器和集成的智能驱动器模块(IPD)可协助设计人员克服上述问题。
系统结构
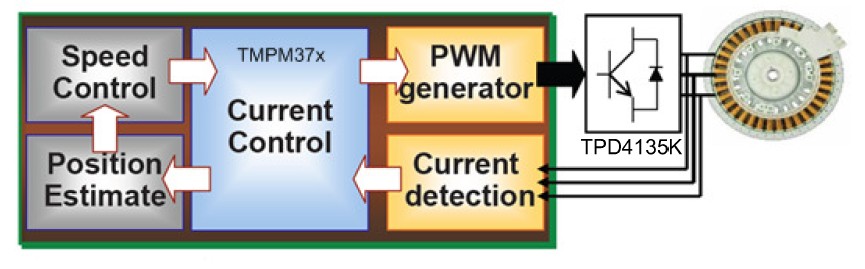
图1 冰箱系统结构框图。
如图1 展示的就是一个基于东芝TMPM374 和IPD TPD4135K 的冰箱控制系统结构框图。
TMPM374 是东芝基于Cortex-M3 内核处理器TX03 家族系列的产品,在该系列中处理器内部均集成了硬件的矢量控制引擎(VE)模块,该矢量控制引擎模块将传统的电机复杂的矢量运算通过硬件替换,简化了开发难度,它的使用极大提高了电机控制系统的稳定及高效。
功率器件TPD4135K 为东芝的3A 智能集成功率模块IPD(Intelligent PowerDevice),该器件支持电压500V,内部集成6 个IGBT 和3 个半桥驱动,同时也集成了半桥驱动的自举二极管、过压保护电路、过流保护电路、过温自动关断电路。因驱动信号可以直接支持5V 电平,适合MCU 直接驱动控制。
TMPM374
东芝基于ARM Cortex-M3内核的处理器, 支持80HMz 的运行频率,5V 工作电压,内部集成128K Flash 和6K RAM.MCU 内部同时也提供了上电复位电路(POR)、电压自动侦测(LVD)、内部可校准的高速RC 振荡电路、1 路UART/SPI、硬件编码盘输入、1 个拥有8 路输出/输入比较通道的16 位定时器、12 位分辨率的ADC,采样频率可达2us@(fADC=40MHz)、可编程马达控制驱动(PMD)、矢量运算引擎(VE)等丰富外设,可满足正常的电机驱动运算需求。

Vector Engine
TMPM374 用于电机驱动的优势在于其内部集成的矢量控制引擎(VE),该引擎是通过将FOC 运算模块用硬件的方式集成在芯片中,用户可不必关心FOC 运算的中间过程,通过直接调用矢量控制引擎(VE)计算得到的数值即可完成电机控制。
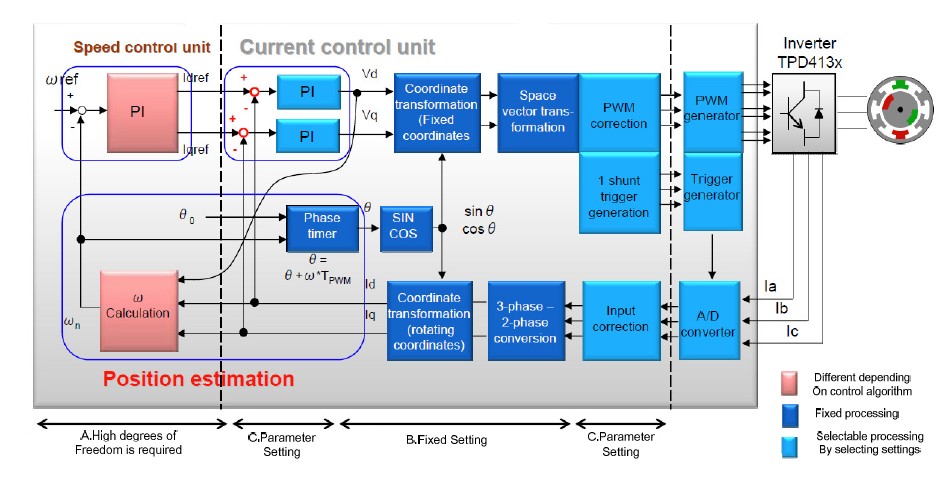
图 2 矢量控制引擎(VE)结构。
如图2,可知矢量控制引擎(VE)通过ADC、马达控制电路(PMD)共同实现马达的矢量驱动控制。 红色区域为速度控制、位置估算,由软件负责,深蓝色区域为硬件固化,浅蓝色区域为可选,可通过配置设定。
在矢量的运算过程中,矢量控制引擎(VE)将负责以下工作(图 3):
1、内置矢量控制执行基本处理(坐标轴变换、相位变换、SIN/COS 运算)? 运算处理使用定点形式的数据。
2、内置马达控制电路(PMD)及ADC 转换器的I/F 处理(输出控制、触发生成、输入处理)?将定点形式的运算结果转换成马达控制电路设定的数据形式?同步触发动作时序?将A/D 转换结果转换成定点形式的数据3、内置的电流控制环的PI 控制(电流控制任务)4、基于PWM 周期的转速积分的相位插值(SIN/COS 运算任务)5、按照电流、电压和转速的值作为基准的归一化值进行运算。

图 3 VE 控制框图
矢量控制引擎的工作方式是以任务的组织、管理构成,在VE 中将矢量的运算过程分解为几个不同的运算任务,通过任务调度来确定当前调度执行的任务及其后的任务执行顺序,同时也提供调度结束后的中断响应。
在任务调度过程中,任务调度器在整个矢量控制引擎中具有至关重要的作用。
该任务调度器将包含以下功能:
1、任务调度功能,使任务按照软件规定的顺序顺序执行;2、待机功能,输出调度任务执行完成后,等待输入调度任务的执行开始;?电流检测完成后给出ADC 中断信号,启动输入调度。
3、具有中断功能,输入调度执行完成后产生中断;4、具有重复功能,输入调度执行后重复进行同一调度;?可进行2 个PWM 周期以上间隔的软件处理。
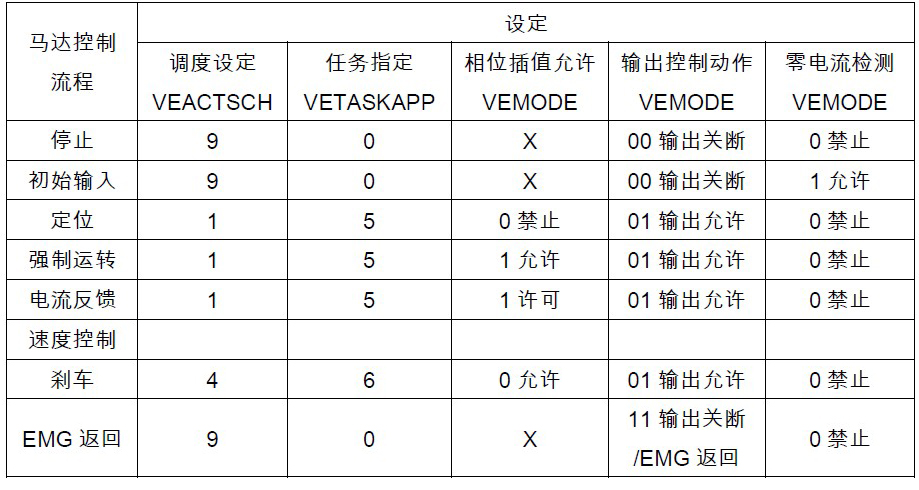
表1 为任务调度管理器的演示任务调度过程。
表1 任务调度示例
软件设计
在系统的软件设计中根据UI 要求细分马达的工作状态,按马达的工作状态来划分可存在5 个工作状态,它们分别是:停止(Stop)、定位(Initposition、也称直流励磁)、强制运转(Force)、强制→稳定转换(Change_up)、稳定(Steady_A)。
如图 4.
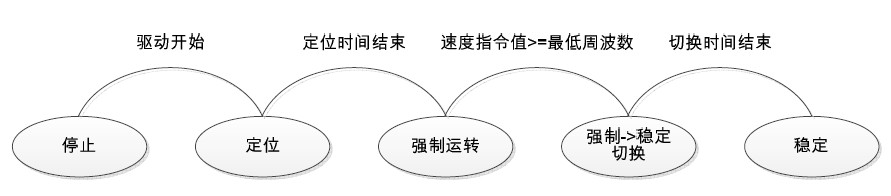
图4 马达控制状态转换。
1、停止(Stop)状态:在该状态下马达停止运行,无相电流。
2、定位(Initposition)状态: 在该状态下电流流经马达线圈使铁芯处产生了磁通量,将转子的位置固定于0 点附近。该位置一旦确定完成后,马达自动进入下一状态。
3、强制运转(Force)状态: 转子开始启动并加速。该状态下马达还未处于矢量控制反馈下,而是人为的强制加入旋转磁场、马达的转子受磁力的影响,跟随该旋转磁场进行物理旋转。当旋转的角速度值达到频率时,马达进入下一状态。
4、強制→稳定的切换(Change_up)状态:马达进行从强制运转切换至稳定状态的处理。当马达转子加速后进入稳定的转速后,进入下一状态。
5、稳定(Steady_A)状态:按照转子的位置和马达目标速度进行驱动。
寄存器配置
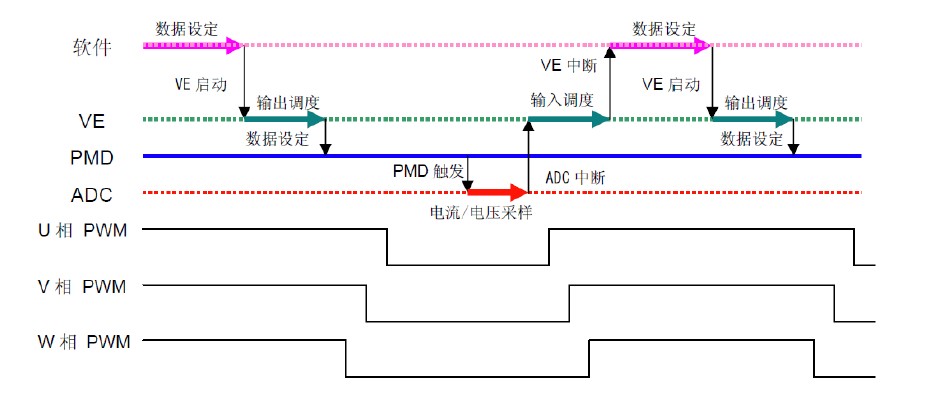
图 5 VE、PMD、ADC 的工作时序。
如图5,启动马达前我们需要分别对ADC、VE、PMD 模块的寄存器进行配置。在ADC 中,需要配置采样通道、ADC 采样时钟、采样完成后通知VE 响应中断。为了同步PMD 模块的PWM 信号,我们需要配置ADC 采样允许PMD 同步触发转换。这里需要注意的是VE 将空间矢量划分为6 个60°的扇区,分别对应ADC 的不同采样通道,由于我们使用的是3 电阻的采样方式,因此需要配置触发来执行输出。根据VE 触发器的生成任务将VE 扇区信息(VESECTORn)自动传送给PMD 程序的触发输出选择寄存器(VETRGSELn)。
在PMD 中模块设定中,由于包含了脉宽调制电路、PWM 控制电路、保护控制电路、死区控制电路,因此相应的软件需要配置PWM 周期及占空比、PWM模式(三角波或锯齿波)、PWM 输出方式、关断模式、死区时间、输出端口极性(High/Low 有效)、保护控制(EMG、OVV)。
在VE 的设定中,需要配置任务调度、d 轴电流环的PI 积分系数和比例系数、q 轴电流环的PI 积分系数和比列系数。
当初始化设置完成后启动VE,使VE、ADC 和PMD 三方协作工作。每当VE的输入调度完成后,将会产生VE中断,通过对中断的响应刷新任务调度器即可实现电机的控制。
总结
基于东芝TX03 系列的变频方案的特点是VE 矢量引擎的硬件化,减少了大量的软件算法及计算运算时间,极大的提高了处理器的执行能力,在满足电机控制的同时并富有大量的运算结余可以用于其它需求。
在电机磁场控制(FOC)硬件化后,也同样提高了控制系统的稳定、可靠性。
同时由于矢量控制引擎(VE)的模块化结构,也使得用户可以自由选择使用或不使用其部分运算模块的功能,使繁琐的电机控制器系统变成通过软件配置灵活的管理任务调度器实现电机磁场控制,极大的缩短了产品设计周期,加速产品上市时间。
版权与免责声明
凡本网注明“出处:维库电子市场网”的所有作品,版权均属于维库电子市场网,转载请必须注明维库电子市场网,https://www.dzsc.com,违反者本网将追究相关法律责任。
本网转载并注明自其它出处的作品,目的在于传递更多信息,并不代表本网赞同其观点或证实其内容的真实性,不承担此类作品侵权行为的直接责任及连带责任。其他媒体、网站或个人从本网转载时,必须保留本网注明的作品出处,并自负版权等法律责任。
如涉及作品内容、版权等问题,请在作品发表之日起一周内与本网联系,否则视为放弃相关权利。
- 什么是MCU2024/3/25 17:05:40
- 了解GD32单片机和STM32单片机2024/3/13 14:17:13
- STM32F103单片机概述2024/3/13 14:13:33
- 什么是DSP?DSP的分类2024/1/22 16:38:45
- 什么是单片机?单片机的详解2024/1/11 17:34:57



