





智能小车主控系统电路设计
出处:电子发烧友 发布于:2015-08-11 16:30:33
随着科技的不断进步,智能电子产品发展步骤不断加快,各种应用层次的机器人等大量出现,目前应用在智能小车或机器人的微控制器主要是8/16单片机或ARM和数字信号处理器DSP等。本设计采用TI公司生产的功耗低运行速度快且价格便宜的MSP430F2274为,避障检测采用测距精准的超声波传感器,该传感器采集小车周围的环境信息并传递给MSP430进行程序判断处理,从而达到控制小车自动避障的目的。
主控芯片
该设计是以MSP430F2274单片机为控制的部件。MSP430是一款16位的超低功耗单片机,采用了精简指令集(RISC)结构,具有丰富的寻址方式,片内资源丰富,处理能力强大、系统工作稳定,主要是它具有多路PWM输出,以作为该设计电机控制的有利资源,系统主控设计图如图2所示。
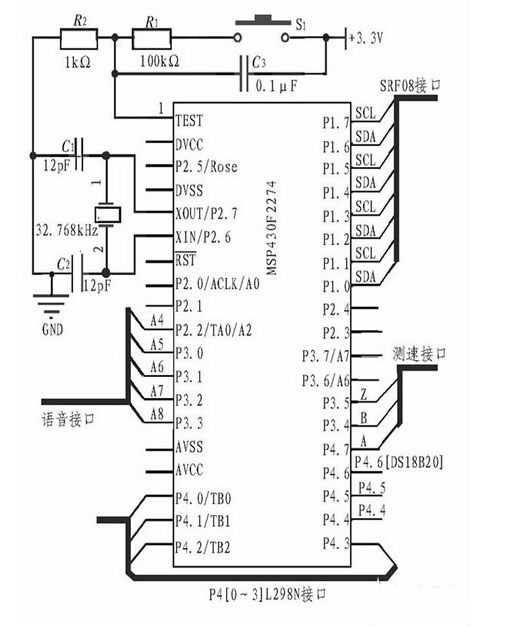
图2 系统主控设计图
超声波模块
避障是智能小车运动过程中基本的功能,而避障首要是确定机器人自身与障碍物的距离并且定位。小车的避障探测模块采用 SRF08超声波收发模块,其波频率为40 kHz,检测距离范嗣为3 cm~6 m,SDA和SCL分别为控制端和接收端,设计共采用4个超声波收发模块分别安装在小车的正前方,右前方和左前方和后方,4个模块分别接在MSP430单片机的I/OP1.0、I/OP1.1、I/OP1.2、I/OP1.3、I/OP1. 4、I/OP1. 5、I/OP1.6、I/OP1.6端口上,采用I/O触发测距,单片机给SDA提供25μs高电平信号,模块自动发送8个40 Hz方波,并且检测是否有返回信号,若有返回信号,SCL管脚输出高电平,高电平持续的时间就是超声波从发射到返回的时间,从而计算出超声波从发射到接收所用的时间t,常温下声波在空气中的传播速度(其中T为摄氏温度),此时可得到是否避障的距离为s=vt/2。
测温和电源模块
为了使计算的距离更而不受温度影响,该设计中加入了DS18B20温度传感器接在I/OP4.6上,实时检测机器人周围环境的温度T(T的值要到小数点后3位),以修正声速的传播公式V,从而提高测距的度。由于MSP430工作电压是3.3 V,电机驱动采用12 V电压,测速模块和超声波模块采用5 V电压,所以采用LM7812、LM7805和LM1117组成稳压电路。。
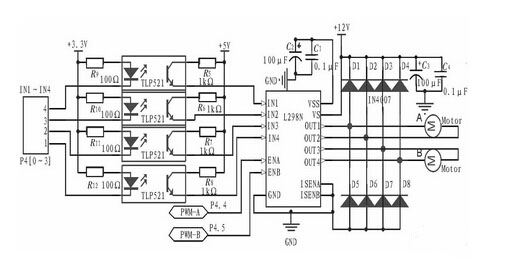
图3 电机驱动模块
电机驱动模块
电机驱动模块是智能车的重要组成部分,它和电机共同组成智能小车的运动控制系统。该设计的驱动轮是由2个M1和M2交流永磁同步电机,因此采用的电机驱动器是高电压大电流高功率的L298N双H桥集成电路,L289N可以驱动两个电机,通过控制输入端IN1-IN4信号,来控制 H桥的通断,使得电机形成正反转或停止,通过控制L298N的使能端EnA、EnB,采用技术成熟的PWM调速原理来控制电机的转速,从而达到控制小车运行的快慢和转向的目的。为了防止在启停电机的瞬间所形成的反馈电流损坏L298N,因此在L298N输出端与电机之间加入8个二极管形成续流达到保护的作用,再则为了防止L298N输出负载端电机对输入端信号传输产生影响,以及对MSP430芯片产生不利的干扰,在L298N的信号输入端通过连接 TLP521可控制的光电电耦合器件,达到对L298N信号输入前端的信号电路与负载的完全隔离,从而增加了电路的安全性,减少了电路信号干扰。本设计中的驱动电机采用的是方波驱动的交流永磁同步电机,该电机的转速与驱动信号的频率成正比,结构简单,调速性能优良,运行可靠且便于维护。其电机驱动和控制模块电路如图3所示。
编辑点评:介绍一种基于MSP430F2274单片机为的智能小车。小车采用超声波测距技术实现自动避障,同时通过语音模块来播报出小车与障碍物的距离。为了使测距不受温度影响,用温度传感器实时检测小车周围环境的温度并修正距离计算公式的参数,采用光电编码器来检测小车的速度,运用PID控制算法和PWM来控制小车的稳定的运行,从而达到预期的设计目标。智能小车涉及到计算机控制、电子机械、自动化等诸多学科。
上一篇:智能汽车演进从车窗升降设计开始
下一篇:教你选择汽车爆震传感器
版权与免责声明
凡本网注明“出处:维库电子市场网”的所有作品,版权均属于维库电子市场网,转载请必须注明维库电子市场网,https://www.dzsc.com,违反者本网将追究相关法律责任。
本网转载并注明自其它出处的作品,目的在于传递更多信息,并不代表本网赞同其观点或证实其内容的真实性,不承担此类作品侵权行为的直接责任及连带责任。其他媒体、网站或个人从本网转载时,必须保留本网注明的作品出处,并自负版权等法律责任。
如涉及作品内容、版权等问题,请在作品发表之日起一周内与本网联系,否则视为放弃相关权利。
- NOVOSENSE - 纳芯微推出车规级温湿度传感器NSHT30-Q1,助力汽车智能化发展2024/4/25 17:50:16
- Keysight - EV 电池设计创新:扩大续航里程、延长电池寿命2024/4/25 17:42:32
- TI - 微型隔离式直流/直流模块如何实现更高的功率密度2024/4/24 15:38:49
- 汽车以太网物理层调试的实用技巧2024/4/23 17:31:42
- 高频电力传输为电动汽车无线充电铺平道路2024/4/12 17:25:08



