





基于模糊控制的智能交通灯监控系统的设计
出处:维库电子市场网 发布于:2018-01-09 15:33:06
城市道路错综复杂,相互交错,交通灯是城市交通的重要指挥系统。交通信号灯作为管制交通流量、提高道路通行能力的有效手段,对减少交通事故有明显效果。但是车流量是随时变化的,而传统的交通灯模式采用的是定时控制,反而容易造成交通堵塞。因此我们需要根据不同的交通路况设置通行时间,本文采用模糊控制算法,设计了一种智能交通灯监控系统。
1、总体方案
交通灯监控系统是一个分布式、集散型、网络化的监控系统,包括监控中心和若干个智能监测终端,能对独立分布的交通灯进行集中监控和维护管理。每个路口看成一个监控终端,都设有一个采集器和一个GPRS模块,而每个方向上都装有一个控制器。控制器用来直接控制交通灯的状态、时间显示屏以及获得各车道车辆信息;采集器用来获取下属的每个控制器的数据以及发送控制命令。采集器将采集到的数据通过GPRS网络发送到监控中心,在监控中心对数据进行分析,进而实现对路况的监控。在此采用模糊控制算法对车辆数据进行分析,实现对红绿灯的控制。
2、模糊控制算法设计
模糊控制是将人们的长期经验作为控制策略,并将它转化成机器可识别的自然语言,进而实现自动控制。在文中,将人对交通指挥策略语言转化为机器语言所描述的控制算法,使得该算法能够模拟人的思维对各个车道的时间分配问题进行很好地分析,从而实现红绿灯时间的可变控制。对一个十字路口来说一个周期分为四个相位,如图1所示(①:东至西,西至东,西至南,东至北;②:西至北,东至南;③:南至北,北至南,南至东,北至西;④:北至东,南至西)。
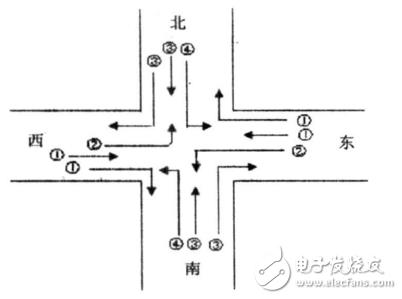
图1 十字路口
2.1、输入和输出变量定义
模糊控制的语言变量是对于输入变量和输出变量而言的,它们是自然语言形式,而不是数值形式给出的变量,选择当前相位等待车辆平均数和下一相位车辆等待平均数为输入变量,当前相位绿灯延时时间为输出语言变量,这样,就选择了一个双输入单输出的二维模糊控制器,如图2所示。
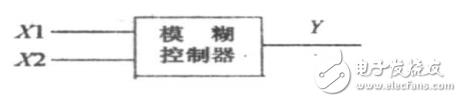
图2 双输入单输出模型
图中,X1:当前相位总车辆数/车道数(取整);
X2:下一相位总车辆数/车道数(取整);
Y:当前相位绿灯显示时间。
2.2、变量设置
(1)输入量:X1和X2。
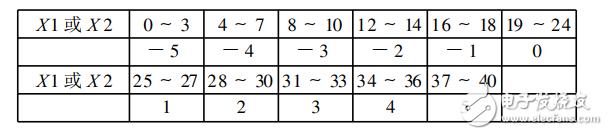
等待的车辆平均数目的基本论域确定为[0,Qmax],Qmax是能接受的等待车辆平均数目,根据实际情况和路况来定,这里选择40。论域是语言变量的量化档数,将等待车辆平均数的论域确定为{-5,-4,-3,-2,-1,0,1,2,3,4,5},输入语言量的基本论域与离散域转换对照表如表1所示。
表1输入车辆平均数目的基本论域与离散域转换对照表
(2)输出量:Y,当前相位绿灯延时时间。
将绿灯延时时间的基本论域确定为[Gmin,Gmax],Gmin是可以接受的绿灯延时时间,Gmax是可以接受的绿灯延时时间,在这里设定Gmin=0s,Gmax=60s。将绿灯延时时间的论域确定为{0,1,2,3,4,5,6,7,8,9,10,11,12}。因为输出量延时时间是连续的,所以有比例因子K=60/12=5,通过比例因子进行反模糊化,从而得到的延时时间:
延时时间=K&mes;模糊集数据
2.3、隶属函数
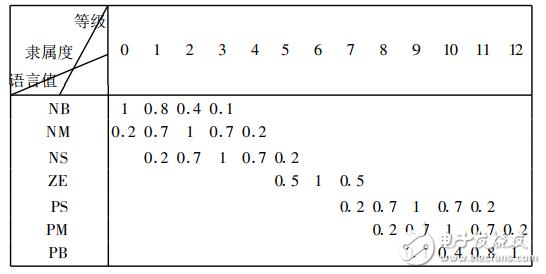
在文中X和Y的语言变量都选取7个语言值,“很少”—“NB”,“较少”—“NM”,“少”—“NS”,“正常”—“ZE”,“多”—“PS”,“较多”—“PM”,“很多”—“PB”。
根据隶属函数,可以建立相应语言变量的赋值表。隶属函数的确定一般是根据经验或统计进行确定,也可以由、权威给出。表2、表3给出输入和输出量各自语言变量的赋值表。
表2 输入量X的语言变量赋值表
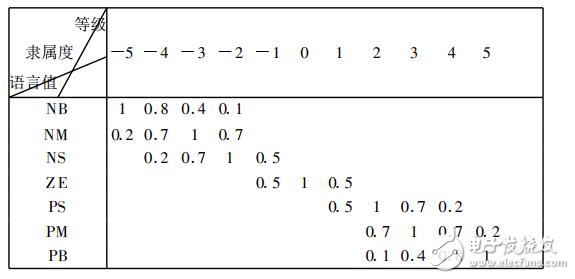
表3 输出量Y的语言变量赋值表
2.4、模糊推理
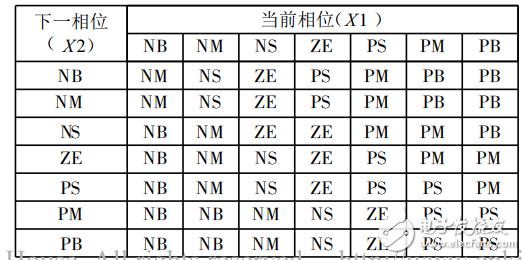
由于模糊规则条数越多,推理速度就越慢,所以只考虑各相位平均车辆数,这并不会影响实际控制效果。因为采用二维模糊控制器,所以使用如下控制规则:
IF A AND B THEN C
可知一共有49条控制规则。由此得到模糊控制规则表,如表4。每条控制规则都对应一种算法,得到模糊关系Ri,所有的并起来得到总的模糊关系R,则:
C=(A&TImes;B)★R
表4 控制规则表
2.5、模糊决策
常用的判决方法有三种:隶属度法,中位数法,加权平均数法。在此选用加权平均数法。要选择适当的权系数,一般的时候取隶属度作为权系数。所以它的公式为:
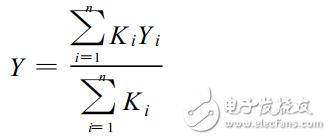
其中,Ki为权系数,在这为隶属度,Yi为论域中的元素。由此就可以得到输出量,进一步经过反模糊化,得到的输出量。
2.6、总结
为了方便,通过以上各步骤,先离线建立查询表,将其存放在计算机中,即模糊化、模糊推理、清晰化等过程通过编程先实现,进而建立控制查询表,在实时时直接通过查询表就可得到相应输出量。这样在实时控制过程中,模糊控制过程便转化为计算量不大的对查询表进行查询的过程,因此,以查找查询表形式实现的模糊控制具有良好的实时性,满足现场控制的要求。
为了使道路交通更为顺畅,应当采用黄闪,并且灯的循环周期不能过长,以免司机出现等待疲劳的情况。数据的采集一般在黄闪时进行,在黄闪结束前下放延时命令。
3、模拟实验
交叉路口车速应当减慢,绿灯期间车辆过道口的速度约为10~15km/h,道口取为15m。设当前情况如表5所示
表5 当前情况
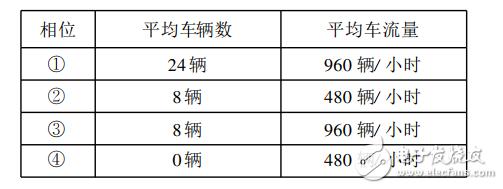
采用固定配时:周期为2分钟,每个相位配时30秒,则绿灯期间每个车道多能过25辆车。一个周期结束时,各相位平均车辆数如表6所示。
采用模糊控制:周期为2分钟,查表得:①相位绿灯时间为42s;②相位绿灯时间为18s;③相位绿灯时间为42s;④相位绿灯时间为18s。一周期结束后,各相位平均车辆数如表6所示。
表6 一周期后各相位情况相位

由表6可知:采用固定配时车流量大的车道容易发生堵车现象,而车流量小的车道所分配的时间又没有得到充分的利用,降低了交叉路口的通行效率。采用模糊控制,动态配时,各相位在一个周期之后与原始状态相差较小,减小了车流量大的车道的车辆数,避免堵车倾向;对车流量较小的车道来说,充分利用所分配的时间,总的来说时间的利用率得到提高,从而加大了交叉路口的通行效率。
4、结束语
模糊控制在交通灯控制系统中的使用解决了如何根据交通状况调整交通灯的状态问题,从而实现交通的可变控制,保持道路的通行效率,它比固定配时更能有效地控制交通。
版权与免责声明
凡本网注明“出处:维库电子市场网”的所有作品,版权均属于维库电子市场网,转载请必须注明维库电子市场网,https://www.dzsc.com,违反者本网将追究相关法律责任。
本网转载并注明自其它出处的作品,目的在于传递更多信息,并不代表本网赞同其观点或证实其内容的真实性,不承担此类作品侵权行为的直接责任及连带责任。其他媒体、网站或个人从本网转载时,必须保留本网注明的作品出处,并自负版权等法律责任。
如涉及作品内容、版权等问题,请在作品发表之日起一周内与本网联系,否则视为放弃相关权利。
- 用于过流保护的交流和直流断路器2024/4/11 17:44:47
- 变电站变压器解释2024/4/3 17:24:03
- 一文看懂压敏电阻和tvs的区分2024/4/1 17:50:10
- 组合电力系统中的波形以消除谐波分量2024/4/1 17:39:45
- 过流保护的交流和直流断路器2024/3/19 17:03:14



