





采用iCoupler技术的电机控制隔离方案
出处:电子发烧友 发布于:2018-08-16 14:03:36
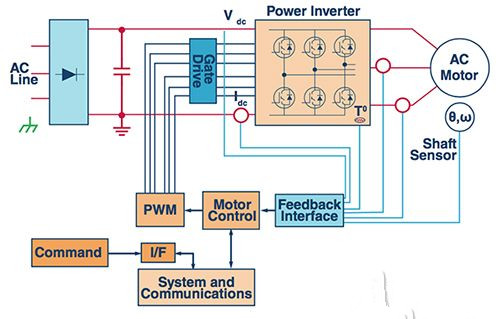
机器人应用需要对驱动许多机器接合点的电机进行控制。 控制系统需要了解各种机器臂和执行器的定位位置,以确保运行安全、可靠。 要做到高效,还需更深入地实时了解电机壳内的转子运动情况。
如没有转子角度的信息(易于在高负载下滑动),电子装置控制器可能会提供太多电流,而这些电流只是通过发热浪费掉了。 为了感测位置和转子状态,控制算法的一个重要变量是电机绕组的电流水平。 从概念上讲,这是一个易于监控的低成本变量,因为它只涉及提供一个从电机到控制电路的链路。 但是,确保信号尽可能准确需要考虑许多因素。 误差会导致无法准确检测位置并增加不必要的能耗。
电机控制中常用的电流传感器是分流电阻器、霍尔效应传感器和电流互感器。 后两个装置提供隔离功能,尽管会增加整体成本,但在处理高功率时非常重要。 分流电阻器电路一般限于测量 50 A 或以下的电流,但其优势是具有传感器类型器件中线性度的响应能力,以及更低的低成本。 这些器件还适合 AC 和 DC 测量。
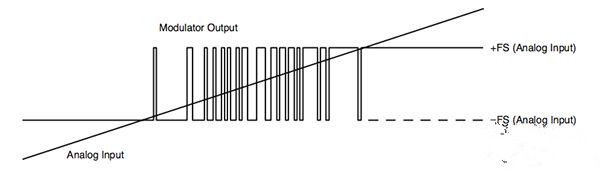
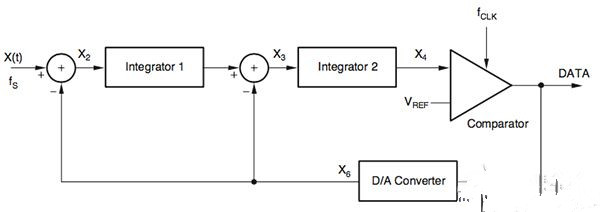
通过将分流电阻器与三角积分调制器耦合,可以实现准确灵敏的结果。 三角积分采样与滤波技术有助于抑制瞬态噪声影响,并可以很好地支持 12 位以上的分辨率。 Texas Instruments 的 ADS1203 即是一种专用于包括电机控制在内的仪表应用的三角积分调制器。 此器件是一个单通道、二阶三角积分调制器,专用于 DC 至 39 kHz 频率范围内的高分辨率模数转换。 此转换器的输出是一连串数字 1 和 0,其时间平均值与模拟输入电压成比例。 使用滤波三角积分调制器信号的一个关键优势是,可将量化噪声源与瞬态噪声源转换至高频率,使其更易于通过低通滤波器滤除。
通过使用调制器代替完整的模数转换器,设计师可以调整数字滤波性能,从而地满足电机控制的要求。其中包括,与向电机本身供电的 H 桥电路中的晶体管开关事件保持严格同步。 滤波器本身可使用数字信号处理器 (DSP)、微控制器或现场可编程门阵列 (FPGA) 来实施,具体取决于成本和性能目标。 通过使用定制滤波器,可以较好地在瞬态响应与终采样分辨率之间进行取舍。 较高的过采样率可带来更高的准确度,但会造成数值更新率较低 - 降低过采样会减小分辨率,但会提供较高的刷新率。
就数据处理而言,有一个与传统逐次逼近 (SAR) 模数转换器的对照。 通过利用 SAR 转换器,可在采样保持电路的协助下执行采样,这让系统设计师可以严格控制采样时刻的定时。 另一方面,三角积分转换采用持续采样流程,因此采样值没有已定义的触发时刻。 反之,此时间点的采样值是一系列 1 位采样值的加权平均值,这一系列采样值可能跨越此采样值代表的这一时间点的值。
对 1 位比特流进行滤波并抽取至较低速率的多比特流采样值,可以在两个不同阶段完成,一种很常见的方法是使用可在一个阶段执行这两个任务的 SINC 滤波器。 三阶通常称为 sinc3,是目前这些应用普遍的选择。
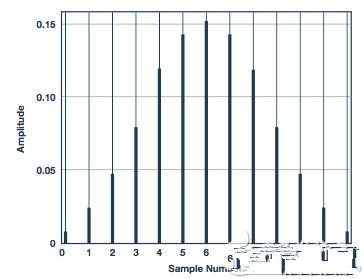
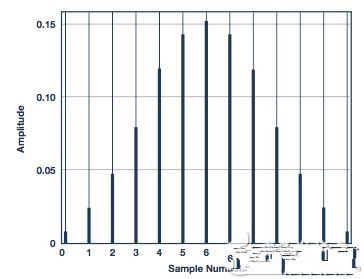
滤波器在很大程度上是一个采样值窗口的加权总和,该加权总和会给予序列中心的采样值更多权重;而给予序列开始和结束处的采样值较少权重。 鉴于测量电流中功率晶体管开关分量的影响,需要考虑这一效应,否则反馈算法将受到混叠等方面的影响。
sinc3 滤波器的脉冲响应与先于中心采样值的采样值贡献度对称,且中心采样值与其后面的采样值相同。 电流的开关分量也沿平均电流点对称:以使开关分量总和为零。 如果采样窗口中心与用于驱动 H 桥的 PWM 同步脉冲对齐,则允许在不混叠的情况下测量相电流,但在从滤波器读取数据时需要注意确保正确对齐采样值。 滤波会强加一个延迟,以便 PWM 同步脉冲时滤波器的采样值输出将来自以前的多个时段。 相比基于 SAR 的电流测量,这在软件程序安排中影响很大。
在 SAR 情况下,PWM 同步脉冲可触发模数转换器执行一系列转换。 当为控制环路准备好数据时,系统会产生中断并开始执行控制环路。 通过利用三角积分调制器和滤波器,这些采样值将连续生成,但相电流测量的重要采样值将在固定延迟后准备就绪。 应使用定时器或计数器应在出现 PWM 同步信号时生成中断。 采样值计数方面的延迟实际上是 sinc3 脉冲响应的一半。
在典型的控制系统中,PWM 定时器的零阶保持效应远超脉冲响应的一半,因此 SINC 滤波器不会严重影响环路定时。 通过利用三角积分调制器和定制滤波器,用户可以自由切换 SINC 滤波器延迟以获得采样值分辨率。 这一灵活性在设计电机控制算法时是一大优势。 通常算法的某些部分对延迟敏感,但对反馈的准确度不太敏感。 算法的其他部分与较低动态结合使用,并受益于准确度,但对延迟不太敏感。
考虑一个比例积分控制器 (PI) 算法。 P 部分和 I 元件可采用相同的反馈信号。 但是,可以分离 P 路径和 I 路径,并将反馈信号与不同类型的滤波功能结合使用。 在 PI 控制器中,P 元件主要用于抑制负载和速度的快速变化效应。 因此,它需要能对信号电平的快速变化做出响应。 I 元件专注于稳态性能,更侧重于测量准确度。 因此,P 元件可受益于低分辨率、快速更新率的电流反馈信号,意味着 sinc3 滤波器的过采样和抽取率较低。 I 元件将受益于较高的过采样率,并可承受所产生的更新率下降。
需要更加注意的是,在处理较大负载的系统中使用三角积分调制器时,另一个需要考虑的因素是隔离。 一个选择是,只使用隔离放大器并为模数转换采用一个非隔离式调制器,或在调制器的输出与用于数字滤波的器件输入之间放置一个光耦合器。 另外,也可选择隔离式三角积分调制器。 通过利用隔离式调制器,可以免除模拟过电流保护电路,因为数字滤波器还可采用可消除过电流效应的配置。
AD7403 由 Analog Devices 提供,便是这样一个例子。 通过实施二阶调制器,此器件允许灵活选择分流器规格,并提供 14 位以上的有效位数以及 20 MHz 的输出流速率。 通过利用适当的数字滤波器,此器件可以 78100 次采样/秒实现 88 dB 的信噪比。 此隔离方案使用该公司的 iCoupler 技术,公司声明该方案超过了典型光耦合器排列结构的性能。
由于加入隔离等功能,以及越来越多微控制器和可编程逻辑器件的滤波性能在增强,设计师可以继续为机器人应用优化电机控制。
如没有转子角度的信息(易于在高负载下滑动),电子装置控制器可能会提供太多电流,而这些电流只是通过发热浪费掉了。 为了感测位置和转子状态,控制算法的一个重要变量是电机绕组的电流水平。 从概念上讲,这是一个易于监控的低成本变量,因为它只涉及提供一个从电机到控制电路的链路。 但是,确保信号尽可能准确需要考虑许多因素。 误差会导致无法准确检测位置并增加不必要的能耗。
电机控制中常用的电流传感器是分流电阻器、霍尔效应传感器和电流互感器。 后两个装置提供隔离功能,尽管会增加整体成本,但在处理高功率时非常重要。 分流电阻器电路一般限于测量 50 A 或以下的电流,但其优势是具有传感器类型器件中线性度的响应能力,以及更低的低成本。 这些器件还适合 AC 和 DC 测量。
通过将分流电阻器与三角积分调制器耦合,可以实现准确灵敏的结果。 三角积分采样与滤波技术有助于抑制瞬态噪声影响,并可以很好地支持 12 位以上的分辨率。 Texas Instruments 的 ADS1203 即是一种专用于包括电机控制在内的仪表应用的三角积分调制器。 此器件是一个单通道、二阶三角积分调制器,专用于 DC 至 39 kHz 频率范围内的高分辨率模数转换。 此转换器的输出是一连串数字 1 和 0,其时间平均值与模拟输入电压成比例。 使用滤波三角积分调制器信号的一个关键优势是,可将量化噪声源与瞬态噪声源转换至高频率,使其更易于通过低通滤波器滤除。
通过使用调制器代替完整的模数转换器,设计师可以调整数字滤波性能,从而地满足电机控制的要求。其中包括,与向电机本身供电的 H 桥电路中的晶体管开关事件保持严格同步。 滤波器本身可使用数字信号处理器 (DSP)、微控制器或现场可编程门阵列 (FPGA) 来实施,具体取决于成本和性能目标。 通过使用定制滤波器,可以较好地在瞬态响应与终采样分辨率之间进行取舍。 较高的过采样率可带来更高的准确度,但会造成数值更新率较低 - 降低过采样会减小分辨率,但会提供较高的刷新率。
就数据处理而言,有一个与传统逐次逼近 (SAR) 模数转换器的对照。 通过利用 SAR 转换器,可在采样保持电路的协助下执行采样,这让系统设计师可以严格控制采样时刻的定时。 另一方面,三角积分转换采用持续采样流程,因此采样值没有已定义的触发时刻。 反之,此时间点的采样值是一系列 1 位采样值的加权平均值,这一系列采样值可能跨越此采样值代表的这一时间点的值。
对 1 位比特流进行滤波并抽取至较低速率的多比特流采样值,可以在两个不同阶段完成,一种很常见的方法是使用可在一个阶段执行这两个任务的 SINC 滤波器。 三阶通常称为 sinc3,是目前这些应用普遍的选择。
滤波器在很大程度上是一个采样值窗口的加权总和,该加权总和会给予序列中心的采样值更多权重;而给予序列开始和结束处的采样值较少权重。 鉴于测量电流中功率晶体管开关分量的影响,需要考虑这一效应,否则反馈算法将受到混叠等方面的影响。
sinc3 滤波器的脉冲响应与先于中心采样值的采样值贡献度对称,且中心采样值与其后面的采样值相同。 电流的开关分量也沿平均电流点对称:以使开关分量总和为零。 如果采样窗口中心与用于驱动 H 桥的 PWM 同步脉冲对齐,则允许在不混叠的情况下测量相电流,但在从滤波器读取数据时需要注意确保正确对齐采样值。 滤波会强加一个延迟,以便 PWM 同步脉冲时滤波器的采样值输出将来自以前的多个时段。 相比基于 SAR 的电流测量,这在软件程序安排中影响很大。
在 SAR 情况下,PWM 同步脉冲可触发模数转换器执行一系列转换。 当为控制环路准备好数据时,系统会产生中断并开始执行控制环路。 通过利用三角积分调制器和滤波器,这些采样值将连续生成,但相电流测量的重要采样值将在固定延迟后准备就绪。 应使用定时器或计数器应在出现 PWM 同步信号时生成中断。 采样值计数方面的延迟实际上是 sinc3 脉冲响应的一半。
在典型的控制系统中,PWM 定时器的零阶保持效应远超脉冲响应的一半,因此 SINC 滤波器不会严重影响环路定时。 通过利用三角积分调制器和定制滤波器,用户可以自由切换 SINC 滤波器延迟以获得采样值分辨率。 这一灵活性在设计电机控制算法时是一大优势。 通常算法的某些部分对延迟敏感,但对反馈的准确度不太敏感。 算法的其他部分与较低动态结合使用,并受益于准确度,但对延迟不太敏感。
考虑一个比例积分控制器 (PI) 算法。 P 部分和 I 元件可采用相同的反馈信号。 但是,可以分离 P 路径和 I 路径,并将反馈信号与不同类型的滤波功能结合使用。 在 PI 控制器中,P 元件主要用于抑制负载和速度的快速变化效应。 因此,它需要能对信号电平的快速变化做出响应。 I 元件专注于稳态性能,更侧重于测量准确度。 因此,P 元件可受益于低分辨率、快速更新率的电流反馈信号,意味着 sinc3 滤波器的过采样和抽取率较低。 I 元件将受益于较高的过采样率,并可承受所产生的更新率下降。
需要更加注意的是,在处理较大负载的系统中使用三角积分调制器时,另一个需要考虑的因素是隔离。 一个选择是,只使用隔离放大器并为模数转换采用一个非隔离式调制器,或在调制器的输出与用于数字滤波的器件输入之间放置一个光耦合器。 另外,也可选择隔离式三角积分调制器。 通过利用隔离式调制器,可以免除模拟过电流保护电路,因为数字滤波器还可采用可消除过电流效应的配置。
AD7403 由 Analog Devices 提供,便是这样一个例子。 通过实施二阶调制器,此器件允许灵活选择分流器规格,并提供 14 位以上的有效位数以及 20 MHz 的输出流速率。 通过利用适当的数字滤波器,此器件可以 78100 次采样/秒实现 88 dB 的信噪比。 此隔离方案使用该公司的 iCoupler 技术,公司声明该方案超过了典型光耦合器排列结构的性能。
由于加入隔离等功能,以及越来越多微控制器和可编程逻辑器件的滤波性能在增强,设计师可以继续为机器人应用优化电机控制。
上一篇:示波器探头自校准的操作步骤
下一篇:二极管电路中检测浪涌电流思路指导
版权与免责声明
凡本网注明“出处:维库电子市场网”的所有作品,版权均属于维库电子市场网,转载请必须注明维库电子市场网,https://www.dzsc.com,违反者本网将追究相关法律责任。
本网转载并注明自其它出处的作品,目的在于传递更多信息,并不代表本网赞同其观点或证实其内容的真实性,不承担此类作品侵权行为的直接责任及连带责任。其他媒体、网站或个人从本网转载时,必须保留本网注明的作品出处,并自负版权等法律责任。
如涉及作品内容、版权等问题,请在作品发表之日起一周内与本网联系,否则视为放弃相关权利。
相关技术资料
- 三坐标测量仪使用步骤及注意事项2024/4/11 17:54:47
- 如何提高接地电阻2024/4/11 16:38:47
- 电流互感器的操作、类型和极性注意事项2024/4/2 17:11:19
- 如何识别变压器引线2024/3/29 17:13:57
- 精确电流测量的模拟直流电流表知识2024/3/28 17:45:12
技术分类
广告

热门技术资料


