





光栅位移传感器的硬件电路设计
出处:电子发烧友 发布于:2023-07-17 11:56:13
1 硬件电路
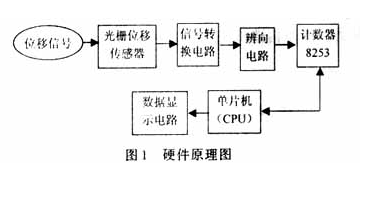
本设计的硬件电路主要由单片机89C51、计数器8253、细分与辨向电路、信号变换电路和光栅位移传感器组成。如图1所示。
1.1 光栅位移传感器
光栅位移传感器包括以下几部分:光栅;光栅光学组成。光栅光学系统的作用是形成莫尔条纹;光电接受系统。光电接受系统是由光敏元件组成,他将莫尔条纹的光学信号转换成电信号,本系统采用的光敏元件是4个硅光电池。
1.2 信号变换电路
信号变换就是将由光敏元件输出的正弦电信号转换成方波信号。本文中采用的比较器LM339,来自光栅的莫尔条纹照到光敏元件硅光电池上,他们所输出的电信号加到LM339的2个比较器的正输入端上,而在这2个比较器的负输入端分别预制一定的参考电压,该参考电压应使光栅输出的方波的高、低电平宽度一样。
1.3 细分与辨向电路
1.3.1 细分电路
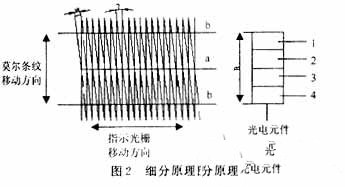
为记录光栅上移过的条纹数目和判断光栅的移动率等,传感器中采用4极硅光电池来接收莫尔条纹信号。调整莫尔条纹的宽度B,使他正好与4个硅光电池的宽度相同。则可直接获得在相位上依次相差90°的4路信号,即进行4倍细分。如图2所示。
1.3.2 辨向电路
位移除了有大小的属性外,还具有方向的属性。为了辨别标尺光栅位移的方向,仅靠一个光敏元件输出一个信号是不行的。必须有2个以上的信号根据他们的相位不同来判断位移方向。因此,本设计采用的是4个硅光电池来接收莫尔条纹信号,则输出的4路信号在相位上依次相差90°,利用这种特点设计的辨向电路的如图3所示。图中u1,u2和u3,u4分别通过相同的电路实现对位移方向的区别。当莫尔条纹上移时(假设经过硅光电池的前2个,此时u1,u2有信号,u3,u4无信号),则图中A点有计数脉冲,B点为恒定电平;当莫尔条纹下移时(假设经过硅光电池的前2个,此时u1,u2有信号,u3,u4无信号),则图中B点有计数脉冲,A点为恒定电平。用2个不同计数器分别记录上移和下移所形成的脉冲数,即可实现辨向。

1.4 LED显示
本文采用动态4位显示。第1位为符号为,莫尔条纹上移为正,下移为负;第2,3位为整数位;第4位为小数位。将所有的段选线并联在一起,由单片机的P1口控制,而共阴极公共端分别由P3.0,P3.1,P3.2,P3.3控制,实现各位分时选通。
2 软件部分
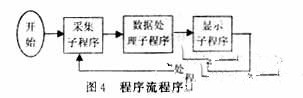
软件部分主要有采集子程序、数据处理和显示子程序组成[4]。
采集子程序完成对计数值的读入和转化;数据处理子程序完成对采集数据的线形化处理;显示子程序对结果进行循环显示。程序的流程如图4所示。
3 结 语
本文中,设计的硬件采用比较器LM339把光敏器件输出信号转换成方波信号,采用逻辑辨向电路,对光栅的正向、反向移动做准确的判断;采用8253的2个计数器分别对正反两路信号进行计数,然后,用89C51进行数据处理,送到显示器显示。硬件结构简单、成本低、工作可靠、比较高;软件采用汇编语言实现,程序简单、可读性强、效率高。
版权与免责声明
凡本网注明“出处:维库电子市场网”的所有作品,版权均属于维库电子市场网,转载请必须注明维库电子市场网,https://www.dzsc.com,违反者本网将追究相关法律责任。
本网转载并注明自其它出处的作品,目的在于传递更多信息,并不代表本网赞同其观点或证实其内容的真实性,不承担此类作品侵权行为的直接责任及连带责任。其他媒体、网站或个人从本网转载时,必须保留本网注明的作品出处,并自负版权等法律责任。
如涉及作品内容、版权等问题,请在作品发表之日起一周内与本网联系,否则视为放弃相关权利。
- DHT11传感器简介及数据传输过程2024/3/20 17:23:57
- 什么是DS18B20温度传感器,DS18B20温度传感器的优缺点2024/2/26 17:15:41
- 使用细铜线作为集成传感器和加热器进行温度控制2024/2/18 16:11:54
- 使用电感器改进现有设计2024/1/22 16:42:19
- 什么是SLAM?SLAM算法涉及的4要素2024/1/17 16:35:15



