





一种自平衡人形机器人动作控制器的设计和实现
出处:谭灵焱 吴 军 文先益 发布于:2011-08-25 11:05:28
移动式机器人在各行各业具有广泛的应用,而轮式移动机器人由于具有结构简单、可控性强、成本低等优点,成为移动式机器人研究的一个主要方向。自平衡机器人采用水平布置的两轮结构,本身是一个不稳定体。也就是说,自平衡机器人在静止状态下,不能保持平衡,车体总是要向前或向后倾倒;而在运动状态下,可以通过一定的控制策略使它达到动态平衡。
由于自平衡机器人具有内在不稳定性和结构灵活性,国内外机器人爱好者设计了多种结构、外观各异的自平衡机器人,尝试采用各种控制策略使其达到自平衡控制。通常这类机器人采用姿态传感器检测机器人车体的倾倒角度和倾倒角速度,根据当前机器人姿态控制伺服电机驱动电压的转向和转速,从而使机器人保持平衡。该方式制作的自平衡机器人虽然控制性能良好,但成本高,不适合广泛推广。为解决机器人动作控制而设计的,它将主处理器发出任务处理命令分配到3个16位超低功耗单片机(MSP430F149)上去执行,实现多层次的控制管理。该人形机器人具有多关节,多自由度,自平衡的控制需求,需要动作控制器在机器人系统控制中起到关键性的作用。
1 动作控制器的设计
1.1 体系结构
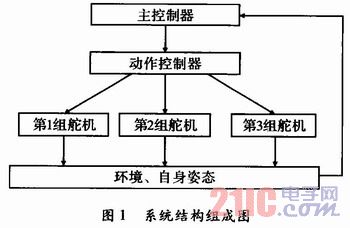
自平衡人形机器人需要获取不可预知的环境信息以及自身姿态信息进行综合运算并及时进行自身姿态的调整。机器人的这种行为特点决定了机器人的整体控制结构要采用反馈控制。如图1所示,描述了这种反馈控制结构的硬件实现。
同时,在图1中可见从机器人主控制器到执行元件(舵机)之间,有一层动作控制器的结构。这一层结构的任务是实现控制命令到舵机控制信号之间的功能转换,这种体系结构的设计,就是借鉴计算机系统结构中的分层结构体系思想。采用这种分层的结构,实现了软件和硬件、命令和动作的相对隔离。其突出的优点体现在能够使主控制器专注于数据的处理,而对下行设备只负责发送指令,对于硬件的复杂的操作时序,由动作控制器负责产生。
1.2 实现过程
1.2.1 硬件实现
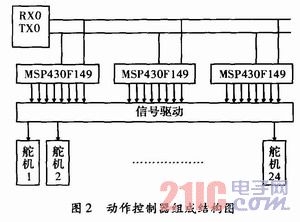
为满足机器人整体控制体系结构中指令到执行的层次性要求,动作控制器需要完成命令解析,信号驱动等任务。如图2描述了动作控制器内部的结构,其主要由串行总线、3个可并行工作的16位单片机、信号驱动部分构成。这种结构能够从总线接收命令,单片机进行指令解析并输出控制电信号,外部电路对控制信号驱动放大,从而分别实现对执行舵机的控制。图3为动作控制器中一个单片机工作模块的硬件原理图。

MSP430是德州公司新开发的一类具有16位总线的带FLASH 的单片机,由于其性价比和集成度高,受到广大技术开发人员的青睐。它采用16位的总线,外设和内存统一编址,寻址范围可达64K,还可以外扩展存储器。具有统一的中断管理,具有丰富的片上外围模块,片内有精密硬件乘法器、两个16位定时器、一个14路的12位的模数转换器、一个看门狗、6路P口、两路USART通信端口、一个比较器、一个DCO内部振荡器和两个外部时钟,支持8M 的时钟。由于为FLASH型,则可以在线对单片机进行调试和,且JTAG口直接和FET(FLASH EMULATION TOOL)的相连,不须另外的仿真工具,方便实用,而且,可以在超低功耗模式下工作,对环境和人体的辐射小,测量结果为100mw左右的功耗(电流为14mA左右),可靠性能好,加强电干扰运行不受影响,适应工业级的运行环境,适合与做手柄之类的自动控制的设备。我们相信MSP430单片机将会在工程技术应用中得以广泛应用,而且,它是通向DSP系列的桥梁,随着自动控制的高速化和低功耗化。
采用比较输出PWM波形的方法相比较采用中断方式的控制方法,具有简单,输出PWM波形稳定,整个控制系统的鲁棒性高等特点。该课题也曾采用过中断控制方式,但用示波器观察输出的PWM波形,波形极不稳定。而且中断嵌套过多之后,单片机程序很容易跑飞,完全不能满足控制系统的稳定性要求。而采用文中所述动作控制器的设计方法后,比较输出的PWM波波形稳定,而且单片机也没出现死机或跑飞的现象。
MSP430F149输出为3.3 V TTL电平,而舵机控制信号要5 V TTL电平,在实际电路设计中要进行电平转换。考虑到舵机的控制信号对功率没有要求,必要加专用驱动芯片,而采用CMOS工艺的CD4081四2输入与门进行电平转换,利用其门电路输入电压门限宽的特点即可解决电平转换的问题。
舵机动态工作时,需要脉冲式的电流,通过普通的电源供电,实验表明:由于舵机瞬时供电不足,致使舵机力矩不够,运动不能达到预先的姿态效果,在反复探索后,决定采用电容的快速放电特性来提供瞬时大电流,由于舵机数量大,设计时在舵机电源处并接大容量电容,总容量0.22F×6.正常小电流工作时,电容被充电处于饱和,当需要瞬时大电流时,电容能快速放电,从而保证舵机正常稳定的工作。
3个MSP430F149分别控制部分关节上的舵机,这要求3个MSP430F149充分协调一致的工作。因此采用总线通信方式,将3个MSP430F149挂接到串行通信总线上,并留出总线接口,以接收主控制器的命令。
1.2.2 软件实现
脉冲宽度调制(PWM),是英文"Pulse Width Modulation"的缩写,简称脉宽调制,是利用微处理器的数字输出来对模拟电路进行控制的一种非常有效的技术,广泛应用在从测量、通信到功率控制与变换的许多领域中。脉冲宽度调制是一种模拟控制方式,其根据相应载荷的变化来调制晶体管栅极或基极的偏置,来实现开关稳压电源输出晶体管或晶体管导通时间的改变,这种方式能使电源的输出电压在工作条件变化时保持恒定,是利用微处理器的数字输出来对模拟电路进行控制的一种非常有效的技术。
动作控制器的软件设计,是以硬件为基础,接收主控制器的命令,对命令进行解析,并控制产生具体的PWM波形对舵机进行动作控制。图4描述了动作控制器中软件的实现流程。

机器人的动作方式,方向,幅度等全部是由主控制器通过对外部信息的获取而产生的输出,这种输出是基于命令格式的,而机器人终的一切行为都是一系列舵机的配合运转,从命令到执行,这其中就是动作控制器起到了关键作用。
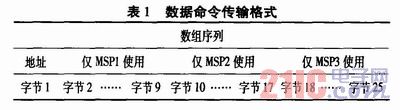
基于上述要求,动作控制器的首要任务就是接收命令。虽然在硬件上采用了多机通信的模式,但并不采用传统的通信协议(每个从机都具有一个独立的地址),而是对动作控制器上的3个MSP430F149定义完全相同的地址,这样就会使其接收到完全相同的命令。这样进行设计,原因在于要保证舵机响应的同时性,即是机器人动作的协调性提出的要求。如表1示例了主控制器与动作控制器的命令传输格式。来自主控制器的命令是一个数组序列,动作控制器上的每个MSP430F149都能完全接收到全部序列,而每个MSP430F149根据预先定义只使用这个序列中特定的子序列,这个子序列就是对应于这个MSP430F149所控制的舵机的命令,这样就可以保证同时性。
动作控制器的终目的是产生PWM波,而这是通过写MSP430F149片内TA、TB模块的寄存器实现的。在解析函数进行一系列的解析运算后,产生出各舵机所需的PWM波形的脉冲宽度值,将这些值写入到相应的寄存器中,就可以产生需要的PWM波。
2 实验及结论
根据文中提出的动作控制器的设计思想与方法,制作出机器人动作控制器。按照设计的基本思想对动作控制器进行测试,测试中采用一个MSP430F425作为机器人主控制器,下行控制一个十二个关节的简易人形机器人。在MSP430F425中规划好机器人的步态,同时根据规划好的步态参数发送舵机动作命令。
实验中,首先实测舵机的,通过向特定定时器通道预装不同值,测量舵机响应角度,并以此数据拟合出舵机响应角度方程。实验中由于采用的MSP430F425资源有限,方程仅进行了线性拟合。
表2为测试机器人上一处关节的舵机测定数据,根据此数据拟合出以下方程:

舵机实际角度α=(X-3 000)/20+75.5运用拟合出的方程进行命令到舵机角度的解析,得到表3所示数据

从表中数据可以看出,在舵机的性能范围内(舵机的为0.5°~1°),控制是的。
同时,在舵机响应的及时性方面,也得到了保证。从主控制器发送命令到舵机响应开始运动共经历了命令传输、命令解析两大时间段。
命令传输在特定的速率下传输完所有命令数据用时4.5 ms,而命令解析即单片机内程序执行,其用时远小于1 ms.相比较,舵机的机械响应时间在百ms级,因此动作控制器保证了响应的及时性。
实验证明,在设计思想指导下的硬件和软件实现,充分符合既定的目标,体现在机器人的多关节能够协调动作,预先规划的步态能够很好的表现出来。
在机器人的实际控制系统中,动作控制器作为主控制器(ARM 9)的下级从属设备,完成其特定的管理范围内工作。在这种分层控制的体系结构下,自平衡的检测与控制达到了理想的效果。
3 结束语
由于自平衡人形机器人具有内在不稳定性和结构的复杂性,国内外机器人爱好者对其控制策略进行了多方面的探索,但通常都是采用反馈控制环路或者是分层体系结构的方法。采用这些传统的方式大体都是中央处理器(ARM、DSP等)接收收集到的信息,进行处理,再根据获取的信息运用一定的算法控制执行元件(舵机、直流电机等)。这类体系结构一般以惟一的处理器为,与外界直接进行信息交换,但其处理器的工作量大,在大量的处理中实时性难以保证。
而本设计对应的双足自平衡人形机器人采用了这两种经典结构的复合,其中执行控制器、主控制器和执行电机之间体现出了明显的层次结构,这种设计减轻了各层次的任务难度,明显提高了设备调试或故障排查效率,充分体现出这种体系结构的优越性。
版权与免责声明
凡本网注明“出处:维库电子市场网”的所有作品,版权均属于维库电子市场网,转载请必须注明维库电子市场网,https://www.dzsc.com,违反者本网将追究相关法律责任。
本网转载并注明自其它出处的作品,目的在于传递更多信息,并不代表本网赞同其观点或证实其内容的真实性,不承担此类作品侵权行为的直接责任及连带责任。其他媒体、网站或个人从本网转载时,必须保留本网注明的作品出处,并自负版权等法律责任。
如涉及作品内容、版权等问题,请在作品发表之日起一周内与本网联系,否则视为放弃相关权利。
- BiCMOS 运算放大器的知识2024/4/16 17:41:17
- 模数转换 – 性能标准2024/4/8 16:37:02
- 解析 PWM (DAC) 性能:第 4 部分 – 非均匀占空比组2024/3/28 17:23:37
- 了解运算放大器的输出信号摆幅2024/3/18 16:29:20
- 模拟和数字传感器和转换器2024/3/7 16:39:16



