





自动驾驶基础——全固态LiDAR之光学相控阵LiDAR介绍
出处:智车科技 发布于:2018-11-06 13:58:59
由于全固态LiDAR内部没有任何宏观或微观上的运动部件,耐久性和可靠性的优势不言而喻,且顺应了自动驾驶对LiDAR固态化、小型化和低成本化的趋势,因此成为车用激光雷达的趋势。下面就按照不同的固态激光雷达技术做简单介绍。首先要介绍的是光学相控阵LiDAR。
1.光学相控阵LiDAR
激光雷达从机械转动向聚束成形的进化趋势与雷达完全相同:军事上广泛应用的相控阵雷达一般拥有上千个发射天线单元,通过调节波束合成的方式,可以改变雷达扫描的方向而不需要机械部件运转,灵活性很高,适合应对高机动目标,还可发射窄波束作为电子战天线。
对于激光雷达,为了完全取消机械结构,考虑通过调节发射阵列中每个发射单元的相位差来改变激光的出射角度,采用相控阵原理实现固态激光雷达。
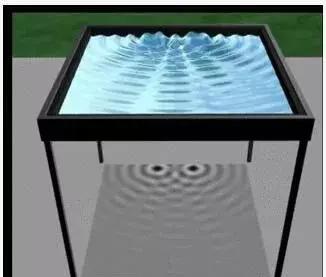
那么什么是相控阵原理呢?生活中常见的干涉例子是水波,两处振动产生的水波相互叠加,有的方向两列波互相增强,有的方向正好抵消,将这个原理放大,采用多个光源组成阵列,通过控制各光源发射的时间差,就能合成角度灵活,且精密可控的主光束,这就是相控阵的原理。
光学相控阵是怎样通过控制发射阵列中每个发射单元的相位差来改变激光的出射角度呢?
我们可以通过一个简单的比喻来认识光学相控阵是如何工作的(如下图 所示):
假设有10个人在左侧排成一列并排向前走,把他们的连线作为他们整体运动的阵列面,垂直于连线向右的方向为前进方向。
如果10个人走路的速度都一样时,则阵列面将平行向前移动,其前进方向不会发生改变,如下图 (a)所示;
如果上方的人走得慢,其他人的速度从上至下依次逐步增加,下方的人走得快,则阵列面不再是平行移动,当经过一段时间后,下方的人走得路程远,上方的人走得路程短,其阵列面的前进方向将向上方发生明显的角度改变,如下图(b)所示;
如果上方的人走得快,其他人的速度从上至下依次逐步减少,下方的人走得慢,则经过一段时间后,阵列面的前进方向将向下方发生明显的角度改变,如下图(c)所示。
上面举的是一维扫描的例子,如果我们把光学相控阵做成向二维阵列(比如下面介绍的Quanergy的方案),我们就可以实现二维的扫描。光学相控阵一般都是通过电信号对其相位进行严格的控制实现光束指向扫描,因此也可以称为电子扫描技术。
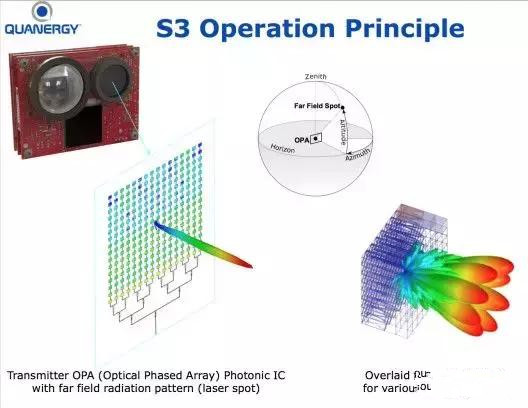
在2016年美国CES展上,Quanergy展出的“固态”SolidState激光雷达,是光学相控阵激光雷达,其满足了激光雷达小型化的大趋势,整个尺寸只有90mm x60mm x60mm。用到的的技术有光学相控阵列Optical Phased Array、光学集成电路Photonic IC、远场辐射方向图Far FieldRadiation Pattern。这款产品完全没有机械固件,可以称得上的纯固态激光雷达了。下图是Quanergy公开的Solid State LiDAR S3光学相控阵扫描雷达工作原理示意图。可以看出S3采用的是光学相控阵技术实现激光扫描,其原理与相控阵雷达一样,通过调节发射阵列中每个发射单元的相位差来改变激光的出射角度。
另外,我们常说激光雷达的抗干扰能力强,那是因为传统机械扫描的激光雷达接收视场特别小,外界的直接照射干扰信号很难对准并进入激光雷达的接收视场。而且,激光雷达能接收到的背景光噪声功率是与接收视场成正比的,视场越大,背景光噪声功率越高。Quanergy的光学相控阵扫描仅能对发射激光束指向进行控制,不能实现接收光路进行同步扫描,这就要求S3激光雷达必须采用一个大视场的接收光学系统来接收激光的回波信号。如果扫描角度范围为±60?,那么接收视场的角度也必须达到±60?,这会造成信噪比的下降,而且容易受到其他同类系统发射的激光信号和太阳直射的干扰。
综合来说,与传统机械扫描技术相比,光学相控阵扫描技术有三大优势:
?扫描速度快:光学相控阵的扫描速度取决于所用材料的电子学特性和器件的结构,一般都可以达到MHz量级以上。
?扫描或指向高:光学相控阵的扫描取决于控制电信号的(一般为电压信号),可以做到μrad(千分之一度)量级以上。
?可控性好:光学相控阵的光束指向完全由电信号控制,在允许的角度范围内可以做到任意指向,可以在感兴趣的目标区域进行高密度的扫描,在其他区域进行稀疏扫描,这对于自动驾驶环境感知非常有用。
但光学相控阵扫描技术也有它的缺点:
? 易形成旁瓣,影响光束作用距离和角分辨率:光束经过光学相控阵器件后的光束合成实际是光波的相互干涉形成的,干涉效果易形成如下图所示的旁瓣,使得激光能量被分散。
?加工难度高,制造工艺难度较大。光学相控阵要求阵列单元尺寸必须不大于半个波长,一般目前激光雷达的工作波长均在1微米左右,这就意味着阵列单元的尺寸必须不大于500纳米。而且阵列数越多,阵列单元的尺寸越小,能量约往主瓣集中,这就对加工要求更高。
?此外,材料的研究和选择也是非常关键的因素,到目前为止,铌酸锂晶体、PLZT压电陶瓷、液晶和AlGaAs基波导光学相控已得到开发。未来,器件方面,进一步减小相控阵单元尺寸,提高衍射效率,减小器件尺寸;更为根本的材料研究方面,开发工作在中波红外、长波红外、紫外波段的液晶材料,以及继续寻求具有大双折射、响应速度快、热稳定性高、耐强激光的高性能电光材料,同时发展对中长波和紫外波段具有较好透过率的电光材料,以扩展光学相控阵器件的应用领域。
1.光学相控阵LiDAR
激光雷达从机械转动向聚束成形的进化趋势与雷达完全相同:军事上广泛应用的相控阵雷达一般拥有上千个发射天线单元,通过调节波束合成的方式,可以改变雷达扫描的方向而不需要机械部件运转,灵活性很高,适合应对高机动目标,还可发射窄波束作为电子战天线。
对于激光雷达,为了完全取消机械结构,考虑通过调节发射阵列中每个发射单元的相位差来改变激光的出射角度,采用相控阵原理实现固态激光雷达。
那么什么是相控阵原理呢?生活中常见的干涉例子是水波,两处振动产生的水波相互叠加,有的方向两列波互相增强,有的方向正好抵消,将这个原理放大,采用多个光源组成阵列,通过控制各光源发射的时间差,就能合成角度灵活,且精密可控的主光束,这就是相控阵的原理。
光学相控阵是怎样通过控制发射阵列中每个发射单元的相位差来改变激光的出射角度呢?
我们可以通过一个简单的比喻来认识光学相控阵是如何工作的(如下图 所示):
假设有10个人在左侧排成一列并排向前走,把他们的连线作为他们整体运动的阵列面,垂直于连线向右的方向为前进方向。
如果10个人走路的速度都一样时,则阵列面将平行向前移动,其前进方向不会发生改变,如下图 (a)所示;
如果上方的人走得慢,其他人的速度从上至下依次逐步增加,下方的人走得快,则阵列面不再是平行移动,当经过一段时间后,下方的人走得路程远,上方的人走得路程短,其阵列面的前进方向将向上方发生明显的角度改变,如下图(b)所示;
如果上方的人走得快,其他人的速度从上至下依次逐步减少,下方的人走得慢,则经过一段时间后,阵列面的前进方向将向下方发生明显的角度改变,如下图(c)所示。

上面举的是一维扫描的例子,如果我们把光学相控阵做成向二维阵列(比如下面介绍的Quanergy的方案),我们就可以实现二维的扫描。光学相控阵一般都是通过电信号对其相位进行严格的控制实现光束指向扫描,因此也可以称为电子扫描技术。
在2016年美国CES展上,Quanergy展出的“固态”SolidState激光雷达,是光学相控阵激光雷达,其满足了激光雷达小型化的大趋势,整个尺寸只有90mm x60mm x60mm。用到的的技术有光学相控阵列Optical Phased Array、光学集成电路Photonic IC、远场辐射方向图Far FieldRadiation Pattern。这款产品完全没有机械固件,可以称得上的纯固态激光雷达了。下图是Quanergy公开的Solid State LiDAR S3光学相控阵扫描雷达工作原理示意图。可以看出S3采用的是光学相控阵技术实现激光扫描,其原理与相控阵雷达一样,通过调节发射阵列中每个发射单元的相位差来改变激光的出射角度。
另外,我们常说激光雷达的抗干扰能力强,那是因为传统机械扫描的激光雷达接收视场特别小,外界的直接照射干扰信号很难对准并进入激光雷达的接收视场。而且,激光雷达能接收到的背景光噪声功率是与接收视场成正比的,视场越大,背景光噪声功率越高。Quanergy的光学相控阵扫描仅能对发射激光束指向进行控制,不能实现接收光路进行同步扫描,这就要求S3激光雷达必须采用一个大视场的接收光学系统来接收激光的回波信号。如果扫描角度范围为±60?,那么接收视场的角度也必须达到±60?,这会造成信噪比的下降,而且容易受到其他同类系统发射的激光信号和太阳直射的干扰。
综合来说,与传统机械扫描技术相比,光学相控阵扫描技术有三大优势:
?扫描速度快:光学相控阵的扫描速度取决于所用材料的电子学特性和器件的结构,一般都可以达到MHz量级以上。
?扫描或指向高:光学相控阵的扫描取决于控制电信号的(一般为电压信号),可以做到μrad(千分之一度)量级以上。
?可控性好:光学相控阵的光束指向完全由电信号控制,在允许的角度范围内可以做到任意指向,可以在感兴趣的目标区域进行高密度的扫描,在其他区域进行稀疏扫描,这对于自动驾驶环境感知非常有用。
但光学相控阵扫描技术也有它的缺点:
? 易形成旁瓣,影响光束作用距离和角分辨率:光束经过光学相控阵器件后的光束合成实际是光波的相互干涉形成的,干涉效果易形成如下图所示的旁瓣,使得激光能量被分散。
?加工难度高,制造工艺难度较大。光学相控阵要求阵列单元尺寸必须不大于半个波长,一般目前激光雷达的工作波长均在1微米左右,这就意味着阵列单元的尺寸必须不大于500纳米。而且阵列数越多,阵列单元的尺寸越小,能量约往主瓣集中,这就对加工要求更高。
?此外,材料的研究和选择也是非常关键的因素,到目前为止,铌酸锂晶体、PLZT压电陶瓷、液晶和AlGaAs基波导光学相控已得到开发。未来,器件方面,进一步减小相控阵单元尺寸,提高衍射效率,减小器件尺寸;更为根本的材料研究方面,开发工作在中波红外、长波红外、紫外波段的液晶材料,以及继续寻求具有大双折射、响应速度快、热稳定性高、耐强激光的高性能电光材料,同时发展对中长波和紫外波段具有较好透过率的电光材料,以扩展光学相控阵器件的应用领域。
关键词:自动驾驶
版权与免责声明
凡本网注明“出处:维库电子市场网”的所有作品,版权均属于维库电子市场网,转载请必须注明维库电子市场网,https://www.dzsc.com,违反者本网将追究相关法律责任。
本网转载并注明自其它出处的作品,目的在于传递更多信息,并不代表本网赞同其观点或证实其内容的真实性,不承担此类作品侵权行为的直接责任及连带责任。其他媒体、网站或个人从本网转载时,必须保留本网注明的作品出处,并自负版权等法律责任。
如涉及作品内容、版权等问题,请在作品发表之日起一周内与本网联系,否则视为放弃相关权利。
相关技术资料
- 高频电力传输为电动汽车无线充电铺平道路2024/4/12 17:25:08
- TI - 你准备好迎接新兴汽车雷达卫星架构了吗?2024/3/12 15:06:28
- 采用 GaN 的汽车降压/反向升压转换器,可实现高效 48 V 配电2024/3/5 17:22:27
- TI - 你准备好迎接新兴汽车雷达卫星架构了吗?2024/3/5 15:25:44
- TI - 电爆驱动器和接触器驱动器如何帮助提高混合动力汽车/电动汽车电池断开系统的安全性和效率2024/3/5 15:21:52
技术分类
广告

热门技术资料


