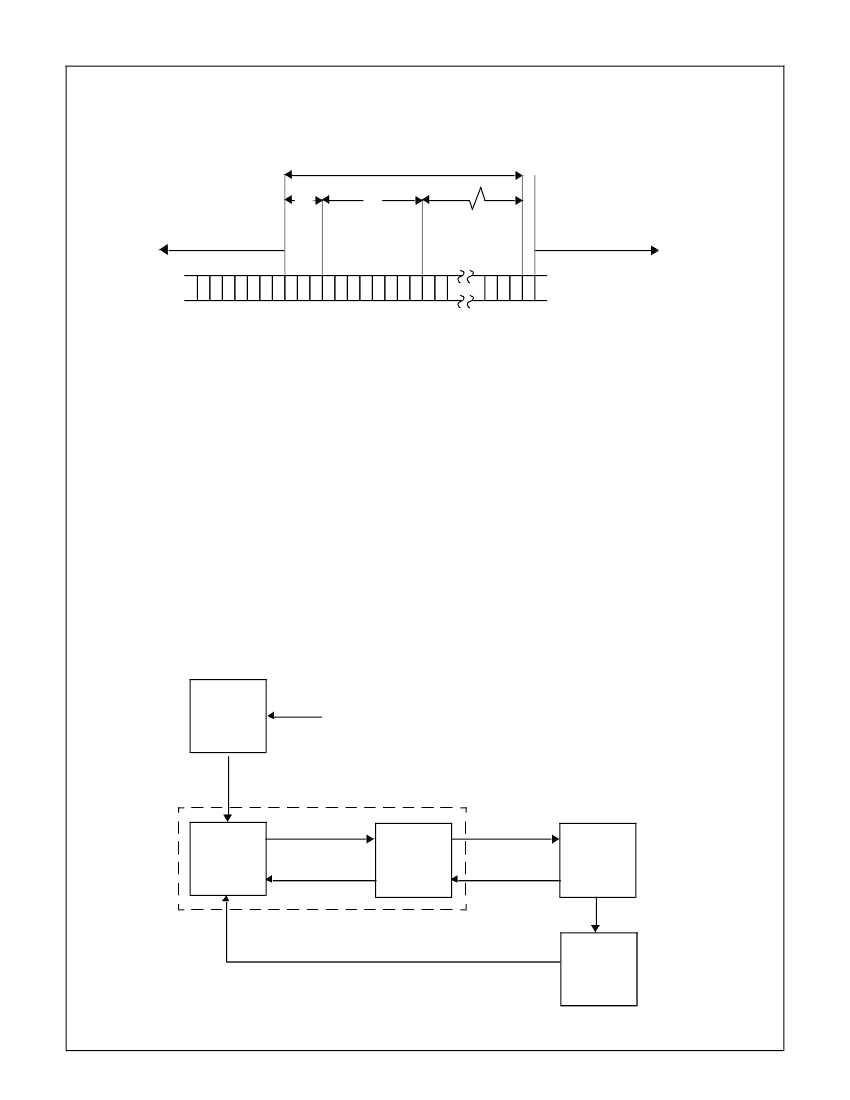
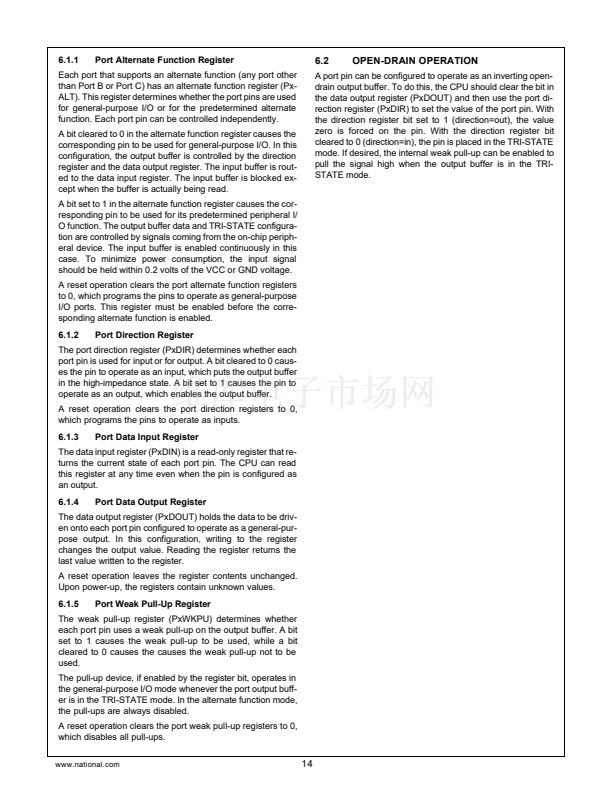
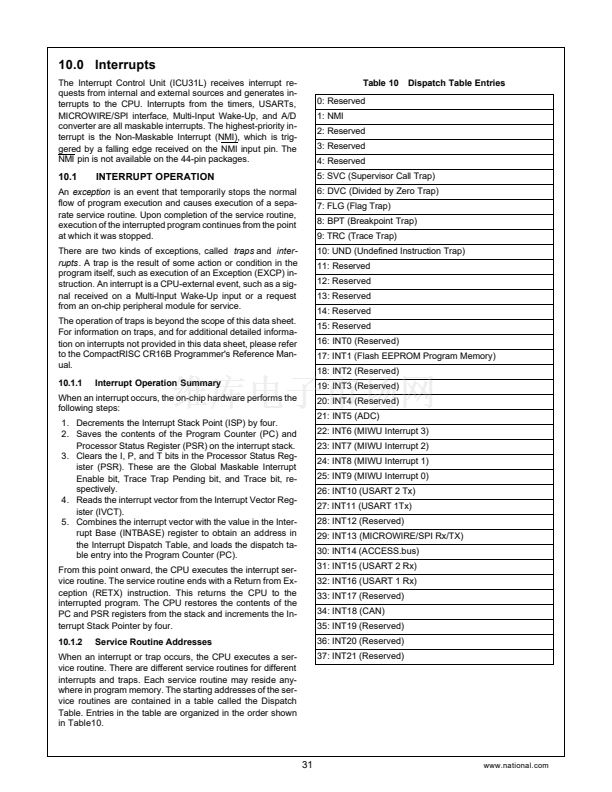
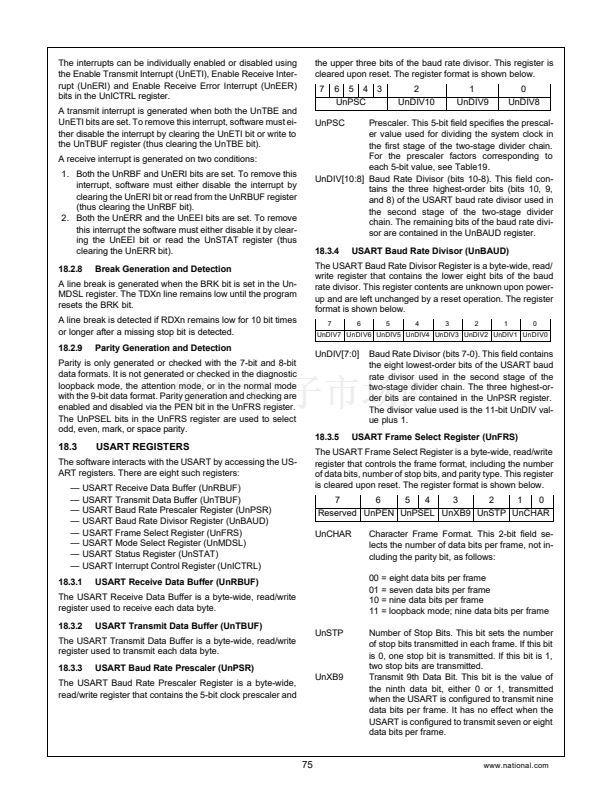
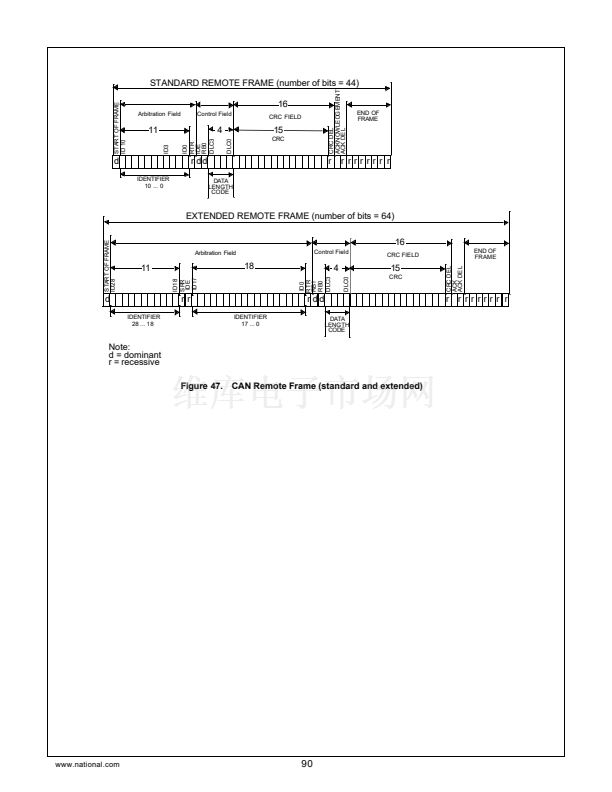
Interframe Space
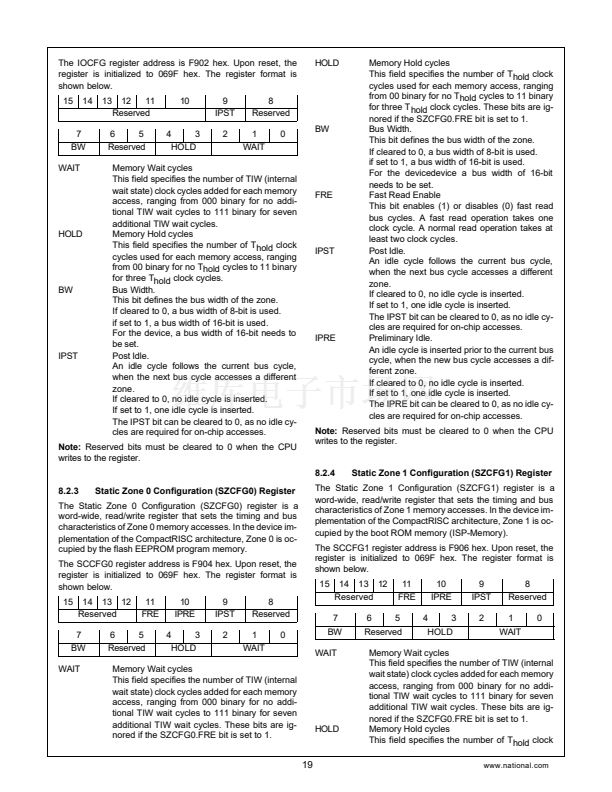
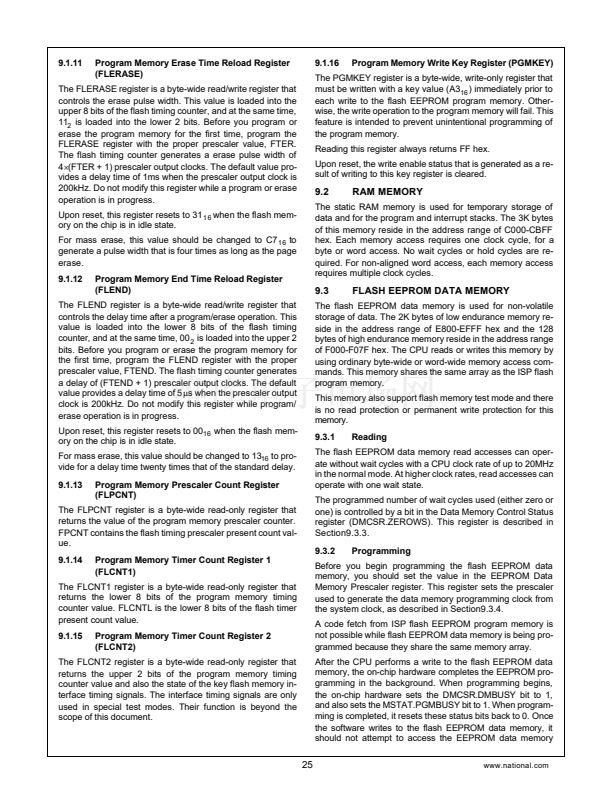
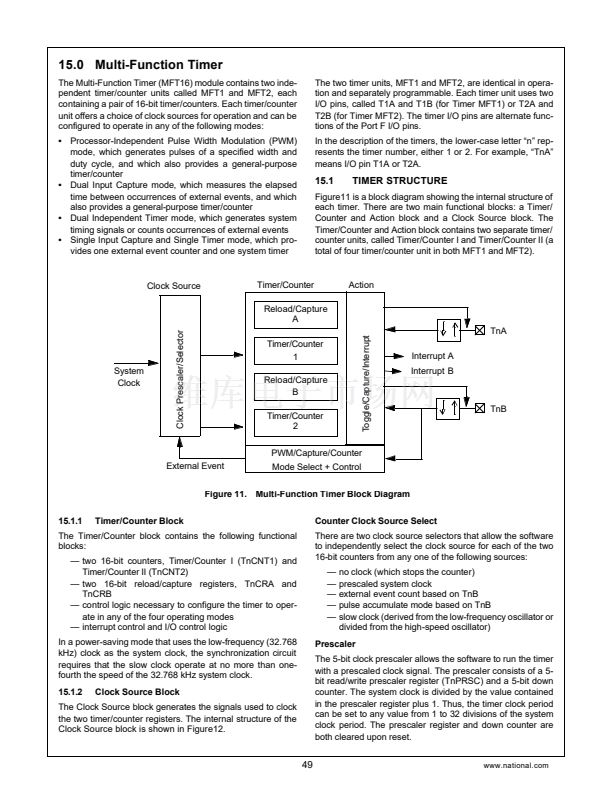
Data and remote frames are separated from every preceding
frame (data, remote, error and overload frames) by the inter-
frame space (see Figure50). Error and overload frames are
not preceded by an interframe space; they can be transmit-
ted as soon as the condition occurs. The interframe space
consists of a minimum of three bit fields depending on the er-
ror state of the node.
INTERFRAME SPACE
3
INT
ANY FRAME
8
SUSPEND
TRANSMIT
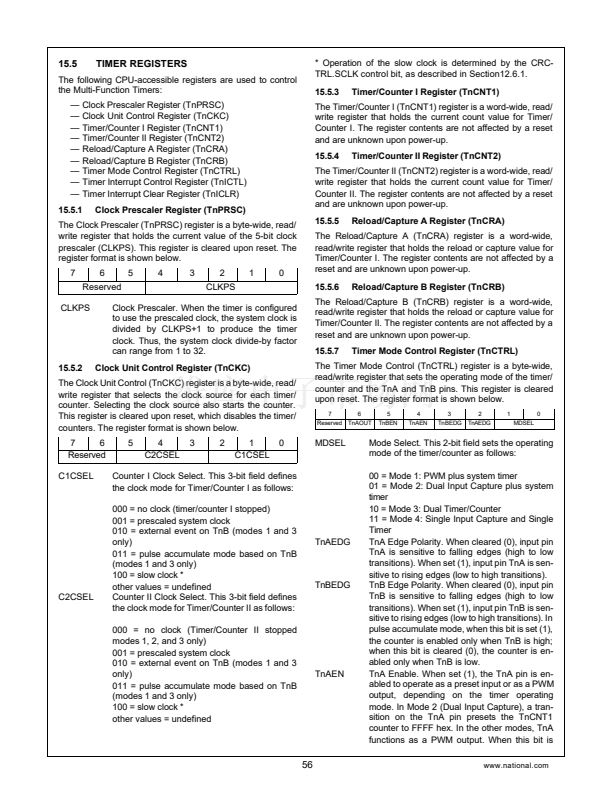
BUS IDLE
START OF FRAME
DATA FRAME OR
REMOTE FRAME
r r r r r r r r r r r r r r r r r r r r
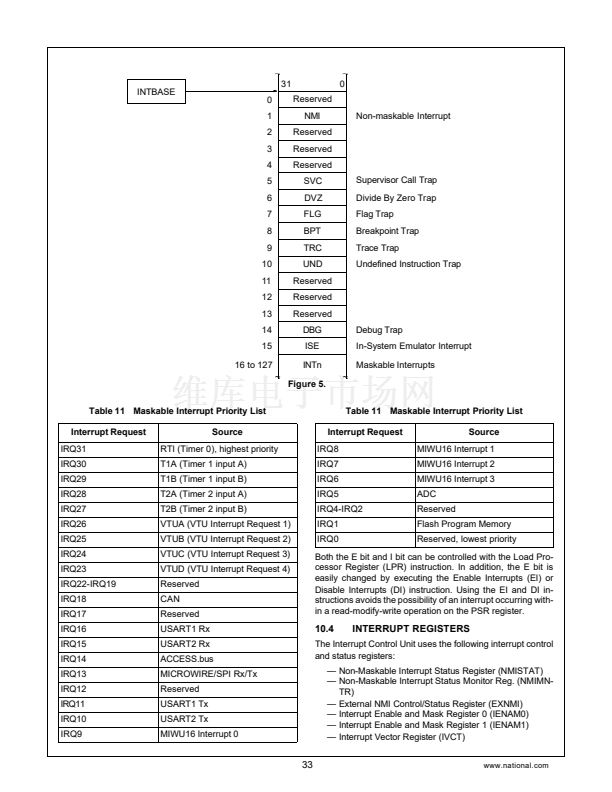
INT = Intermission
Suspend Transmission is only for error passive nodes.
r r r d
Note:
d = dominant
r = recessive
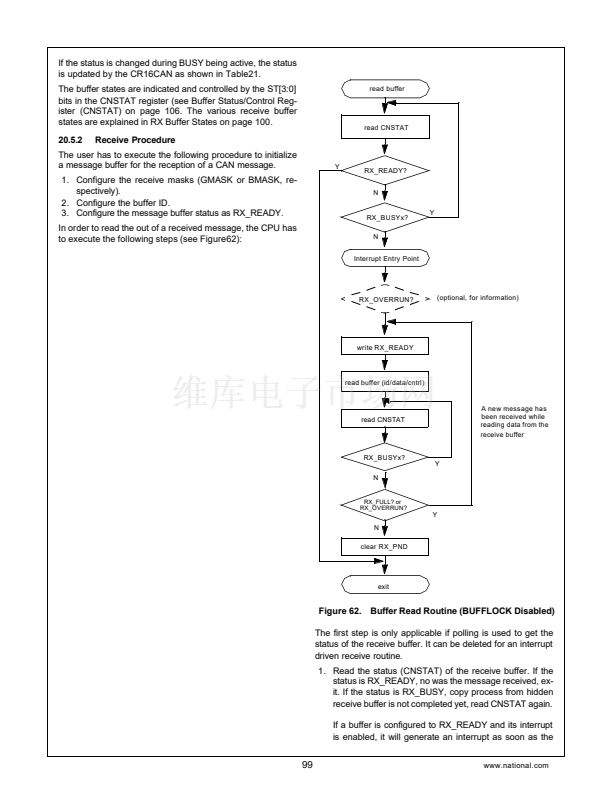
Figure 50.
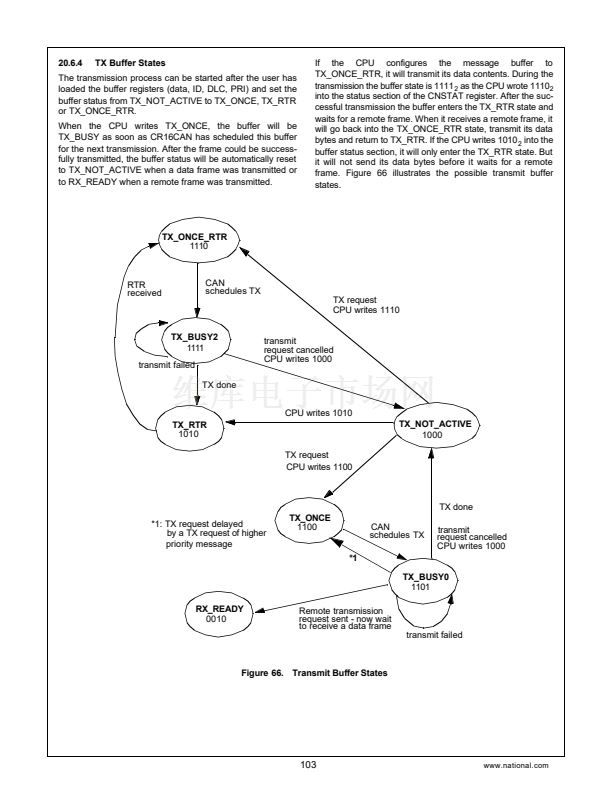
20.2.2
Error Detection and Management
CAN Interframe Space
鈥?Stuff Error
A stuff error is detected if the bit level after 6 consecu-
tive bit times has not changed in a message field that
has to be coded according to the bit stuffing method.
鈥?Form Error
A form error is detected, if a fixed frame bit (e.g., CRC
delimiter, ACK delimiter) does not have the specified
value. For a receiver, a 鈥榙ominant鈥?bit during the last bit
of End of Frame does not constitute a frame error.
鈥?Bit CRC Error
A CRC error is detected if the remainder of the CRC
calculation of a received CRC polynomial is non-zero.
鈥?Acknowledgment Error
An acknowledgment error is detected whenever a
transmitting node does not get an acknowledgment
from any other node (i.e., when the transmitter does
not receive a 鈥榙ominant鈥?bit during the ACK frame)
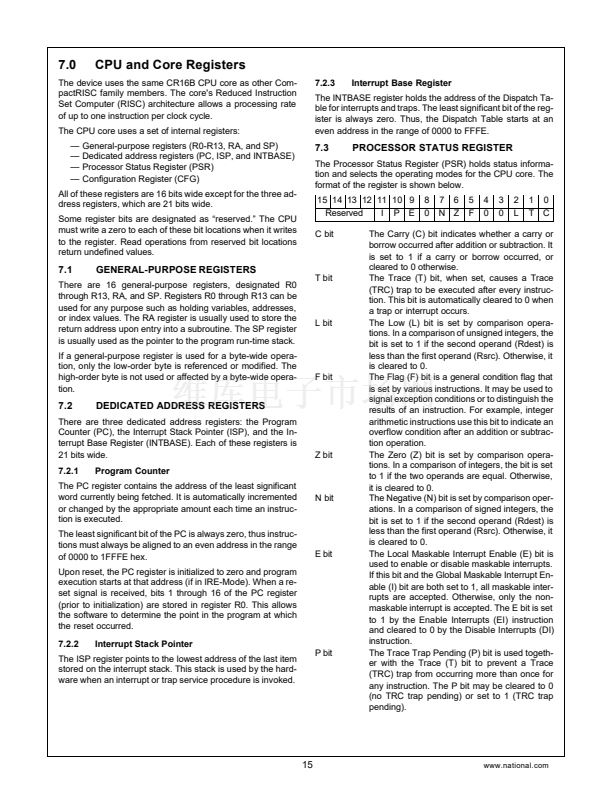
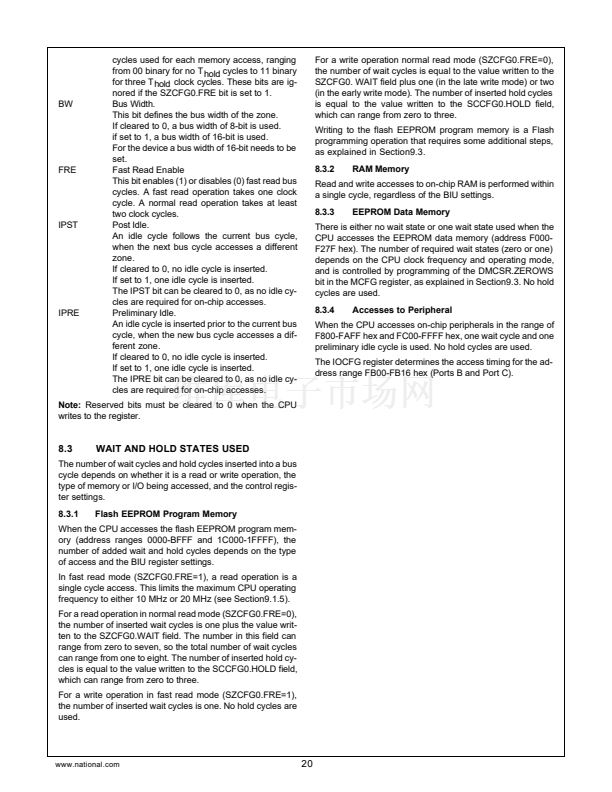
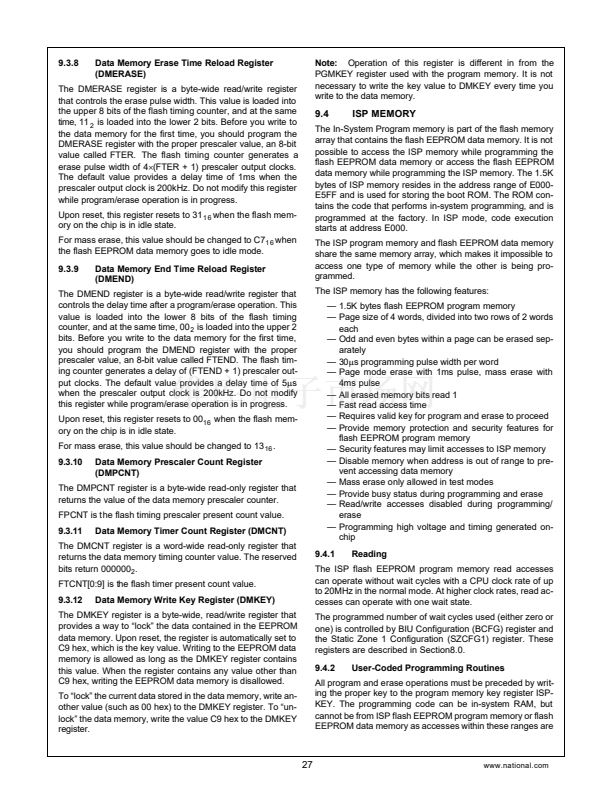
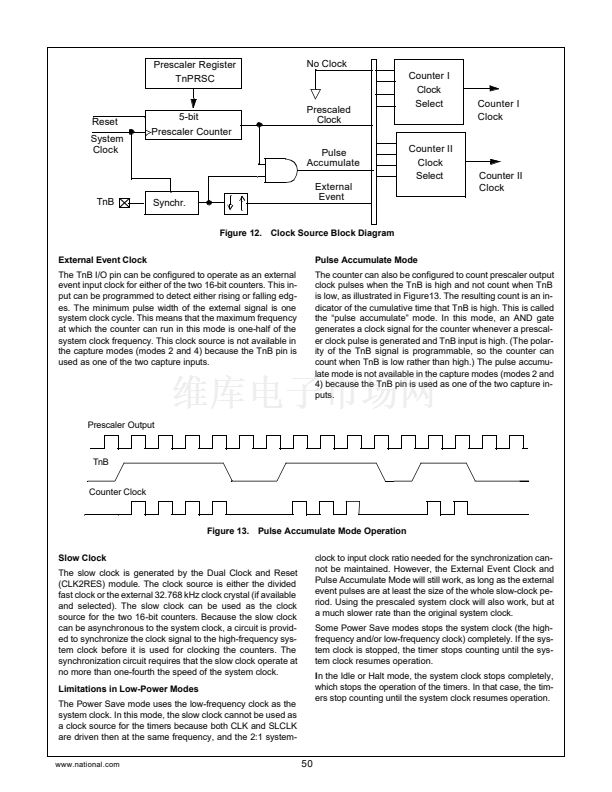
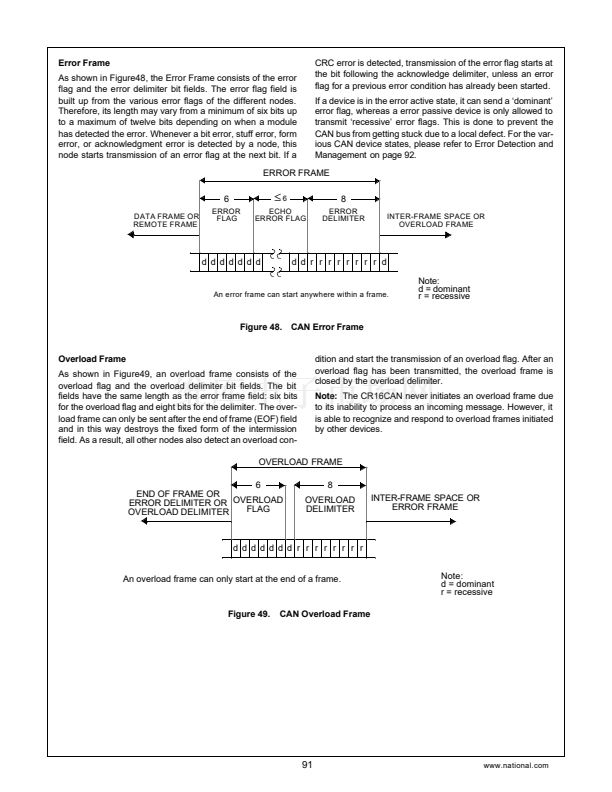
There are multiple mechanisms in the CAN protocol to detect
errors and inhibit erroneous modules from disabling all bus
activities. Each CAN module includes two error counters, a
receive and a transmit error counter, for error management.
Error Types
The following errors can be detected:
鈥?Bit Error
A CAN device which is currently transmitting also mon-
itors the bus. If the monitored bit value is different from
the transmitted bit value, a bit error is detected. How-
ever, the reception of a 鈥榙ominant鈥?bit instead of a 鈥榬e-
cessive鈥?bit during the transmission of a passive error
flag, during the stuffed bit stream of the arbitration field
or during the acknowledge slot is not interpreted as a
bit error.
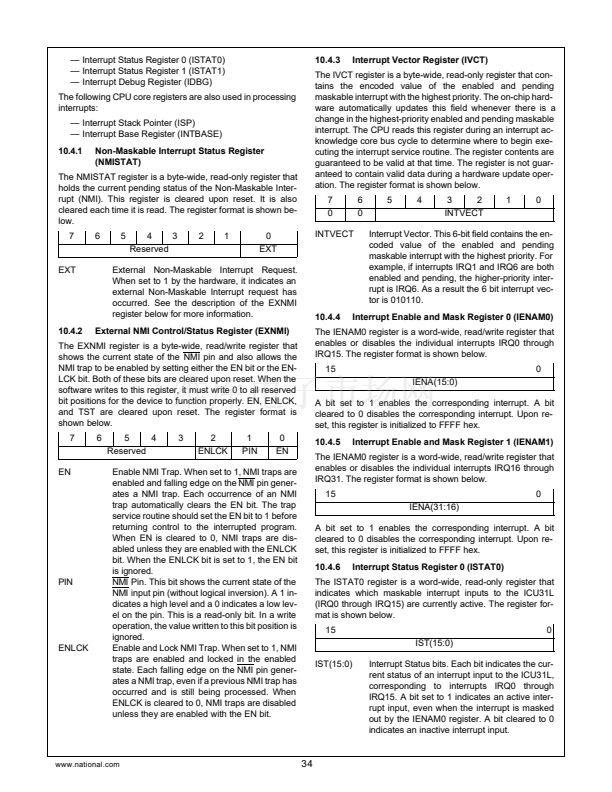
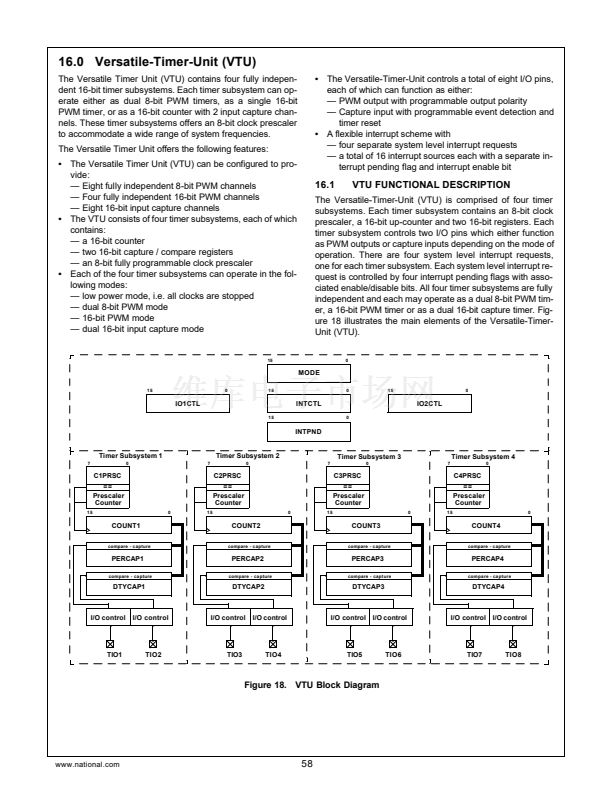
external RESET or
enable CR16CAN
SYNC
11 consecutive 鈥榬ecessive鈥?bits
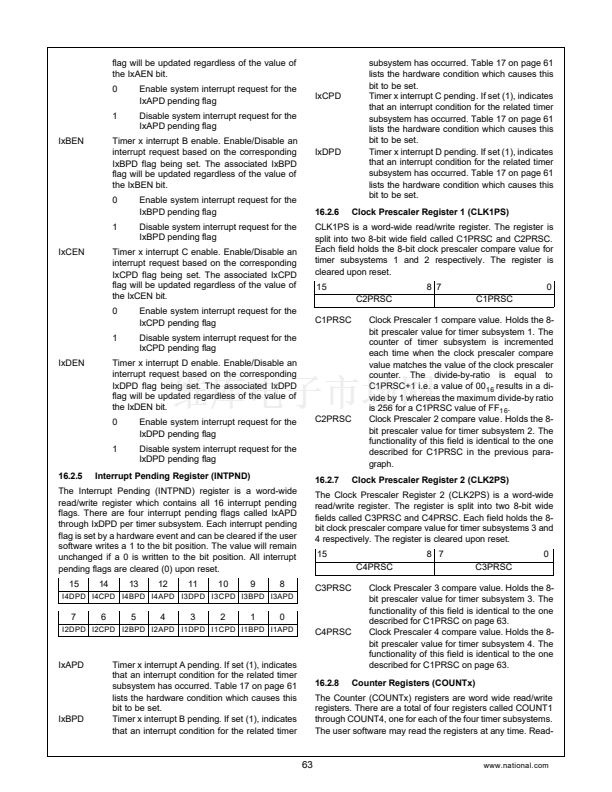
received
(TEC OR REC) > 95
(TEC OR REC) > 127
ERROR
ACTIVE
(TEC AND REC) < 96
ERROR
WARNING
(TEC AND REC) < 128
ERROR
PASSIVE
TEC > 255
128 occurrences of
11 consecutive 鈥榬ecessive鈥?bits
BUS
OFF
Figure 51. CR16CAN Bus States
www.national.com
92









 1
1
 2
2
 3
3
 4
4
 5
5
 6
6
 7
7
 8
8
 9
9
 10
10
 11
11
 12
12
 13
13
 14
14
 15
15
 16
16
 17
17
 18
18
 19
19
 20
20
 21
21
 22
22
 23
23
 24
24
 25
25
 26
26
 27
27
 28
28
 29
29
 30
30
 31
31
 32
32
 33
33
 34
34
 35
35
 36
36
 37
37
 38
38
 39
39
 40
40
 41
41
 42
42
 43
43
 44
44
 45
45
 46
46
 47
47
 48
48
 49
49
 50
50
 51
51
 52
52
 53
53
 54
54
 55
55
 56
56
 57
57
 58
58
 59
59
 60
60
 61
61
 62
62
 63
63
 64
64
 65
65
 66
66
 67
67
 68
68
 69
69
 70
70
 71
71
 72
72
 73
73
 74
74
 75
75
 76
76
 77
77
 78
78
 79
79
 80
80
 81
81
 82
82
 83
83
 84
84
 85
85
 86
86
 87
87
 88
88
 89
89
 90
90
 91
91
 92
92
 93
93
 94
94
 95
95
 96
96
 97
97
 98
98
 99
99
 100
100
 101
101
 102
102
 103
103
 104
104
 105
105
 106
106
 107
107
 108
108
 109
109
 110
110
 111
111
 112
112
 113
113
 114
114
 115
115
 116
116
 117
117
 118
118
 119
119
 120
120
 121
121
 122
122
 123
123
 124
124
 125
125
 126
126
 127
127
 128
128
 129
129
 130
130
 131
131
 132
132
 133
133
 134
134
 135
135
 136
136
 137
137
 138
138
 139
139
 140
140
 141
141
 142
142
 143
143
 144
144
 145
145
 146
146
 147
147
 148
148
 149
149
 150
150
 151
151
 152
152
 153
153
 154
154
 155
155
 156
156
