





2·35 机器人监视电路
出处:davidli88 发布于:2008-12-28 00:00:00 | 1856 次阅读
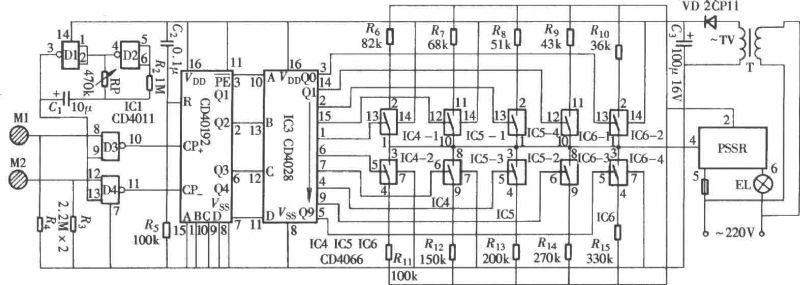
图2-35是机器人监视电路。电路中,VT5为输人电路,采用光电晶体管TPSA6O3A,VT5中电流大小随环境明暗程度不同而变化。若VT5的发射极接电阻,VT5检测光变化的灵敏度就会降低。为此,电路中接入VTl晶体管,A点的电位就成了VTl的基极-发射极电位与VD1的正向电压降之和。通常,VT5的电流非常小,A点电位几乎恒定。受Cl的影响,VTl的基极电流响应变慢,VT5的电流变化时,A点电位会发生变化。光的变化有明暗两种情况。仅检测明亮的情况,即光明亮变化时,VT5的电流增大,A点电位变高。

由74HCUO4中的F6、F5等构成放大与检测电路。C2是隔直电容,用于除去A点输出的直流成分。F6是A点输出信号的放大电路。C3为积分电路,用于抑制荧光灯等光的脉动。F6的输出加偏移电压,由RP1进行调整,并作为F5的输入。F5为高低电平的数字输出,捕获到光的变化时输出高电平。
由电容G5与二极管VD4、电阻R6和R7构成点亮LEDl的脉冲产生电路。F5输出高电平时,C5通过R6快速充电;F5输出低电平时,C5通过R7缓慢放电,该信号经过F4就变为单稳态多谐振荡器那样的输出,再通过VT4驱动LEDl发光报警。也可以外接报警器。
由F1、F2和VT2及VT3等构成电动机控制电路,由Fl和F2构成振荡电路,输出5s间隔的短脉冲信号,该脉冲信号经VT2和VT3进行电流放大,司隙驱动电动机并使其转动。RP2用于调整驱动电动机的脉宽,RP2阻值时,脉宽约4Oms。驱动电动机时,VT5的输人会发生变化,灵敏度高的放大器也会受到电动机噪声的影响。为此,驱动电动机期司与驱动之后一段时间要为F4提供虚拟输入信号,可采用与LEDl脉冲产生相同电路来延长电动机的驱动脉冲,由F3将其变为数字信号,并将产生的虚拟信号加到F4输大端。
由74HCUO4中的F6、F5等构成放大与检测电路。C2是隔直电容,用于除去A点输出的直流成分。F6是A点输出信号的放大电路。C3为积分电路,用于抑制荧光灯等光的脉动。F6的输出加偏移电压,由RP1进行调整,并作为F5的输入。F5为高低电平的数字输出,捕获到光的变化时输出高电平。
由电容G5与二极管VD4、电阻R6和R7构成点亮LEDl的脉冲产生电路。F5输出高电平时,C5通过R6快速充电;F5输出低电平时,C5通过R7缓慢放电,该信号经过F4就变为单稳态多谐振荡器那样的输出,再通过VT4驱动LEDl发光报警。也可以外接报警器。
由F1、F2和VT2及VT3等构成电动机控制电路,由Fl和F2构成振荡电路,输出5s间隔的短脉冲信号,该脉冲信号经VT2和VT3进行电流放大,司隙驱动电动机并使其转动。RP2用于调整驱动电动机的脉宽,RP2阻值时,脉宽约4Oms。驱动电动机时,VT5的输人会发生变化,灵敏度高的放大器也会受到电动机噪声的影响。为此,驱动电动机期司与驱动之后一段时间要为F4提供虚拟输入信号,可采用与LEDl脉冲产生相同电路来延长电动机的驱动脉冲,由F3将其变为数字信号,并将产生的虚拟信号加到F4输大端。
0次
上一篇:2·34 机器人跟踪电路
下一篇:4字控制键盘电路图
版权与免责声明
凡本网注明“出处:维库电子市场网”的所有作品,版权均属于维库电子市场网,转载请必须注明维库电子市场网,https://www.dzsc.com,违反者本网将追究相关法律责任。
本网转载并注明自其它出处的作品,目的在于传递更多信息,并不代表本网赞同其观点或证实其内容的真实性,不承担此类作品侵权行为的直接责任及连带责任。其他媒体、网站或个人从本网转载时,必须保留本网注明的作品出处,并自负版权等法律责任。
如涉及作品内容、版权等问题,请在作品发表之日起一周内与本网联系,否则视为放弃相关权利。
电路图分类
广告

热门电路图
最新电路图


