





使用电位计进行直流电机位置控制 – 兼容 ARDUINO
出处:维库电子市场网 发布于:2024-03-15 16:18:01 | 655 次阅读
这是使用操纵杆的步进电机驱动器的脉冲发生器。该板包含 Arduino 兼容的微控制器和电路,用于控制最多 2 通道(2 轴)步进电机。该板具有多种选项来开发步进电机相关的控制系统,从 2 轴模拟操纵杆到微调电位器,再到用于连接步进驱动器与光耦合器输入的 7 通道集电极开路 TTL 输出等。
硬件的主要特性
ATMEGA328 Arduino 兼容微控制器用于 Arduino 编程/引导加载程序的连接器2 x 轴(2 通道操纵杆)驾驶室用于驱动步进器前进、后退2 x 微调电位器 可用于设置加速/减速或其他功能。1个轻触开关7 路输出集电极开路连接器用于直接 7 路输出的可选连接器用于限位开关或其他功能的连接器 CN3 和 CN5(带上拉电阻)用于模拟输入的连接器 CN6 和 CN7连接器 CN8 I/O一个触觉开关内部操纵杆ULN2003 芯片开放式连接器,用于连接步进驱动器连接到 D12 的功能 LED电源指示灯带上拉电阻的分接连接器用于连接限位开关
特征
电源 5V直流使用操纵杆控制两个步进电机所有步进和方向信号集电极开路类型和 TTL 电平(7 个输出)用于 Arduino 直接输出的板载可选连接器 CN2多种硬件选项可用于开发步进电机的多种应用4 x 3 毫米安装孔PCB 尺寸 61.28 x 36.20 毫米
应用
基于步进电机的线性/旋转执行器转台相机滑块摄像机云台机械臂机器人技术自动化动画电子学 ARDUINO 示例代码
硬件有很多I/O线。Arduino 代码示例中使用了以下硬件:
操纵杆 2 x 轴Axis-1 Arduino D5 步进脉冲输出,D8 方向输出(输出为步进驱动器光耦合器的集电极开路类型)Axis-2 Arduino D6 步进脉冲输出,D7 方向输出(输出为步进驱动器光耦合器的集电极开路类型) 用户将能够使用操纵杆运行两个步进驱动器。请检查连接图。
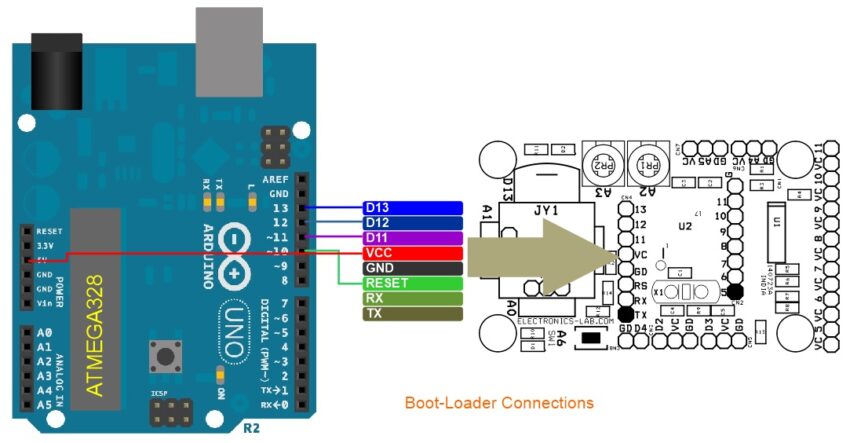
CN1:引脚 1 = OP11(D11),引脚 2 = VCC,引脚 3 = OP10(D10),引脚 4 = VCC,引脚 5 = OP9(D9),引脚 6 = VCC,引脚 7 = OP8(D8),引脚8 = VCC,引脚 9 = OP7(D7),引脚 10 = VCC,引脚 11 = OP6(D6),引脚 12 = VCC,引脚 13 = OP5(D5),引脚 14 = VCCCN2:DNP(D5、D6、D6、D7、D8、D9、D10、D11)直接 I/O(可选)CN3:引脚 1 = D2 上拉,引脚 2 = VCC,引脚 3 = GNDCN4:引脚 1 = TX,引脚 2 = RX,引脚 3 = 复位,引脚 4 = GND,引脚 5 = VC,引脚 6 = D11,引脚 7 = D12,引脚 8 = D13CN5:引脚 1 = D3-带上拉,引脚 2 = VCC,引脚 3 = GNDCN6:引脚 1 VCC,引脚 2 = A4,引脚 3 = GNDCN7:引脚 1 VCC,引脚 2 = A5,引脚 3 = GNDCN8:引脚 1 = D4 - 带上拉,引脚 2 = GNDSW1:触觉开关 = 模拟引脚 A6D2:LED = D12D1:电源指示灯P1:操纵杆 X 轴 = 模拟 A1P2:操纵杆 Y 轴 = 模拟 A0PR1:微调电位器 = 模拟 A2PR2:微调电位器 = 模拟 A3
示意图
零件清单
硬件的主要特性
ATMEGA328 Arduino 兼容微控制器用于 Arduino 编程/引导加载程序的连接器2 x 轴(2 通道操纵杆)驾驶室用于驱动步进器前进、后退2 x 微调电位器 可用于设置加速/减速或其他功能。1个轻触开关7 路输出集电极开路连接器用于直接 7 路输出的可选连接器用于限位开关或其他功能的连接器 CN3 和 CN5(带上拉电阻)用于模拟输入的连接器 CN6 和 CN7连接器 CN8 I/O一个触觉开关内部操纵杆ULN2003 芯片开放式连接器,用于连接步进驱动器连接到 D12 的功能 LED电源指示灯带上拉电阻的分接连接器用于连接限位开关
特征
电源 5V直流使用操纵杆控制两个步进电机所有步进和方向信号集电极开路类型和 TTL 电平(7 个输出)用于 Arduino 直接输出的板载可选连接器 CN2多种硬件选项可用于开发步进电机的多种应用4 x 3 毫米安装孔PCB 尺寸 61.28 x 36.20 毫米
应用
基于步进电机的线性/旋转执行器转台相机滑块摄像机云台机械臂机器人技术自动化动画电子学 ARDUINO 示例代码
硬件有很多I/O线。Arduino 代码示例中使用了以下硬件:
操纵杆 2 x 轴Axis-1 Arduino D5 步进脉冲输出,D8 方向输出(输出为步进驱动器光耦合器的集电极开路类型)Axis-2 Arduino D6 步进脉冲输出,D7 方向输出(输出为步进驱动器光耦合器的集电极开路类型) 用户将能够使用操纵杆运行两个步进驱动器。请检查连接图。
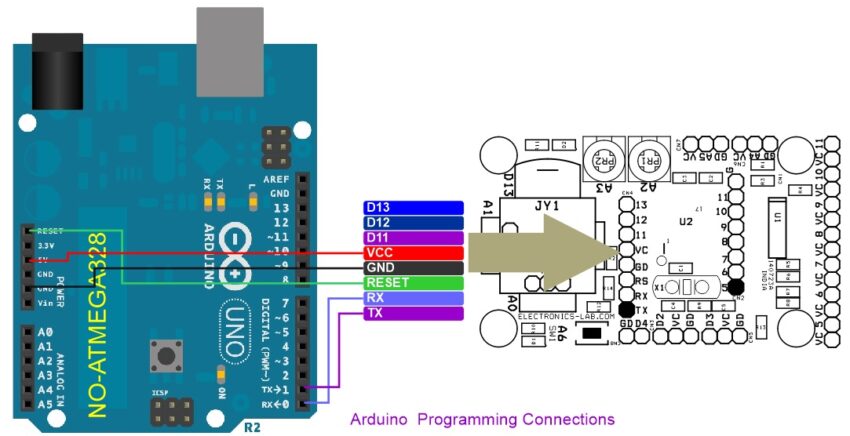
CN1:引脚 1 = OP11(D11),引脚 2 = VCC,引脚 3 = OP10(D10),引脚 4 = VCC,引脚 5 = OP9(D9),引脚 6 = VCC,引脚 7 = OP8(D8),引脚8 = VCC,引脚 9 = OP7(D7),引脚 10 = VCC,引脚 11 = OP6(D6),引脚 12 = VCC,引脚 13 = OP5(D5),引脚 14 = VCCCN2:DNP(D5、D6、D6、D7、D8、D9、D10、D11)直接 I/O(可选)CN3:引脚 1 = D2 上拉,引脚 2 = VCC,引脚 3 = GNDCN4:引脚 1 = TX,引脚 2 = RX,引脚 3 = 复位,引脚 4 = GND,引脚 5 = VC,引脚 6 = D11,引脚 7 = D12,引脚 8 = D13CN5:引脚 1 = D3-带上拉,引脚 2 = VCC,引脚 3 = GNDCN6:引脚 1 VCC,引脚 2 = A4,引脚 3 = GNDCN7:引脚 1 VCC,引脚 2 = A5,引脚 3 = GNDCN8:引脚 1 = D4 - 带上拉,引脚 2 = GNDSW1:触觉开关 = 模拟引脚 A6D2:LED = D12D1:电源指示灯P1:操纵杆 X 轴 = 模拟 A1P2:操纵杆 Y 轴 = 模拟 A0PR1:微调电位器 = 模拟 A2PR2:微调电位器 = 模拟 A3
示意图
零件清单
0次
版权与免责声明
凡本网注明“出处:维库电子市场网”的所有作品,版权均属于维库电子市场网,转载请必须注明维库电子市场网,https://www.dzsc.com,违反者本网将追究相关法律责任。
本网转载并注明自其它出处的作品,目的在于传递更多信息,并不代表本网赞同其观点或证实其内容的真实性,不承担此类作品侵权行为的直接责任及连带责任。其他媒体、网站或个人从本网转载时,必须保留本网注明的作品出处,并自负版权等法律责任。
如涉及作品内容、版权等问题,请在作品发表之日起一周内与本网联系,否则视为放弃相关权利。
电路图分类
广告

热门电路图
最新电路图


