





汽车ESP用传感器及其接口技术
出处:zlutian 发布于:2007-06-03 17:24:19
ESP(Electronic Stability Program,电子稳定程序)是汽车电控的一个标志性发明。不同的研发机构对这一系统的命名不尽相同,如博世(BOSCH)公司早期称为汽车动力学控制(VDC),现在博世、梅赛德—奔驰公司称为ESP;丰田公司称为汽车稳定性控制系统(VSC)、汽车稳定性辅助系统(VSA)或者汽车电子稳定控制系统(ESC);宝马公司称为动力学稳定控制系统(DSC)。尽管名称不尽相同,但都是在传统的汽车动力学控制系统,如ABS和TCS的基础上增加一个横向稳定控制器,通过控制横向和纵向力的分布和幅度,以便控制任何路况下汽车的动力学运动模式,从而能够在各种工况下提高汽车的动力性能,如制动、滑移、驱动等。ESP在国外已经批量生产,在国内尚处于研究阶段,要达到产业化的程度,还有大量的工作要做。
图1所示为汽车ESP的构成示意图
 |
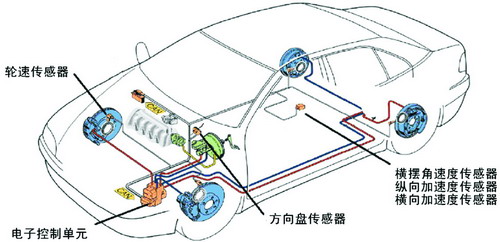
图1 ESP的构成示意图
ESP常用传感器介绍
如图1、图2所示,ESP常用的传感器如下。

图2 ESP常用传感器
方向盘转角传感器
ESP通过计算方向盘转角的大小和转角变化速率来识别驾驶员的操作意图。方向盘转角传感器将方向盘转角转换为一个可以代表驾驶员期望的行驶方向的信号,方向盘转角一般是根据光电编码来确定的,安装在转向柱上的编码盘上包含了经过编码的转动方向、转角等信息。这一编码盘上的信息由接近式光电耦合器进行扫描。接通点火开关并且方向盘转角传感器转过一定角度后,处理器可以通过脉冲序列来确定当前的方向盘转角。方向盘转角传感器与ECU的通讯一般通过CAN总线完成。
横摆角速度传感器
横摆角速度传感器检测汽车沿垂直轴的偏转,该偏转的大小代表汽车的稳定程度。如果偏转角速度达到一个阈值,说明汽车发生测滑或者甩尾的危险工况,则触发ESP控制。当车绕垂直方向轴线偏转时,传感器内的微音叉的振动平面发生变化,通过输出信号的变化计算横摆角速度。
纵向/横向加速度传感器
ESP中的加速度传感器有沿汽车前进方向的纵向加速度传感器和垂直于前进方向的横向加速度传感器,基本原理相同,只是成90°夹角安装。ESP一般使用微机械式加速度传感器,在传感器内部,一小片致密物质连接在一个可以移动的悬臂上,可以反映出汽车的纵向/横向加速度的大小,其输出在静态时为2.5V左右,正的加速度对应正的电压变化,负的加速度对应负的电压变化,每1.0-1.4V对应1g的加速度变化,具体参数因传感器不同而有所不同。
轮速传感器
在汽车上检测轮速信号时,常用的传感器是电磁感应式传感器,一般
|
|
初的ESP系统中纵向/横向加速度传感器和横摆角速度传感器都是单独实现的,现在基本都使用了传感器总成(Sensor Cluster)的模式,将这3个传感器设计为一体,通过CAN总线与ECU通讯。如图3为SIMENS VDO公司和BEI公司生产的传感器总成。

图3 传感器总成(Sensor Cluster)
博世公司为了增加新的ESP功能和为了更好的控制整车的稳定性系统,如山地保持控制(HHC)和线控(SbW),提出了模块化的HW和SW概念,开发了第三代高度灵活和低成本的慢性传感器总成DRS MM3.x。
ESP常用传感器接口设计
本文所作设计的框图如图4所示。在图中,方向盘转角传感器信号经微控制器处理后,通过CAN总线发送给ECU(图4中B);横摆角速度传感器、纵向/横向传感器由于信号特点和安装位置类似,故设计在同一个模块内(图4中A);由于ESP对轮速传感器信号的实时性要求较高,故经过信号调理后,直接送入ECU(图4中C)。在图4的A和B中,需要微处理器对信号进行处理并通过CAN总线传送数据,本文选用Infineon公司的SAK-C164CI。该芯片是专为汽车应用而设计,内置AD转换器、输入信号捕捉、正交解码器,运算速度快,非常适合ESP的传感器信号处理。
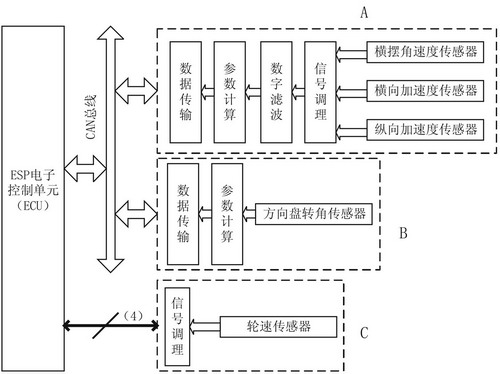
图4 传感器连接框图
方向盘转角传感器接口
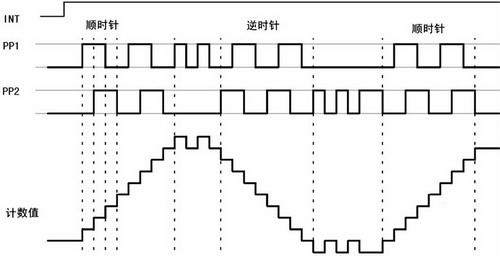
方向盘转角传感器的输出为正交编码脉冲。正交编码脉冲包含两个脉冲序列,有变化的频率和四分之一周期(90°)的固定相位偏移,如图5所示。通过检测2路信号的相位关系可以判断为顺时针方向和逆时针方向,并据此对信号进行加/减计数,从而得到当前的计数累计值,也即方向盘的转角,而转角的变化率即角速度,则可通过信号频率测出。另外,方向盘转角传感器有一个零位输出信号,当方向盘在中间位置时,该信号输出0V,否则输出5V,通过该信号,可对转角进行在线校准。
&n
|
|
C164CI与方向盘转角传感器的接口电路如图6所示。片内内置增量编码的正交解码器,该解码器使用定时器3的两个引脚(T3IN、T3EUD)作为正交脉冲的输入,在正确设置相关寄存器后,定时器3的数据寄存器的值与方向盘转角成正比,故可方便的计算转角,本文所使用的方向盘转角传感器每一圈对应44个脉冲,设定时器3的数据寄存器为T3,则转角为.
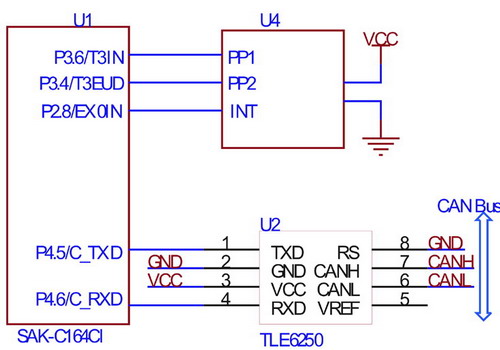
图6 方向盘转角传感器接口电路
对(1)式进行差分运算,即可得到转角变化速率。微控制器把计算得到的参数通过CAN发送给ECU。
轮速传感器接口
根据前面部分介绍的轮速传感器信号特点,设计接口电路如图7所示。
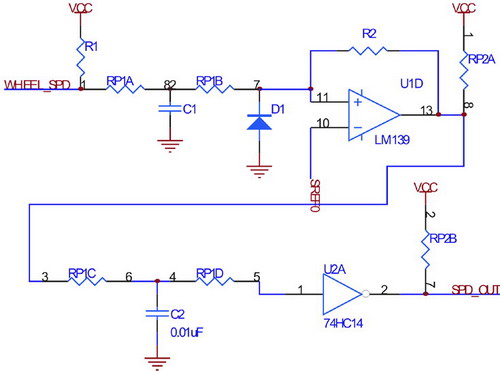
图7 轮速传感器接口电路
电路采用两级滤波和整形,以保证轮速信号在极低转速下不会丢失,同时避免因悬架振动引起的信号干扰。图中由电阻R2引入级迟滞比较,而使用74HC14引入第二级迟滞比较。
横摆角速度、纵向/横向加速度传感器
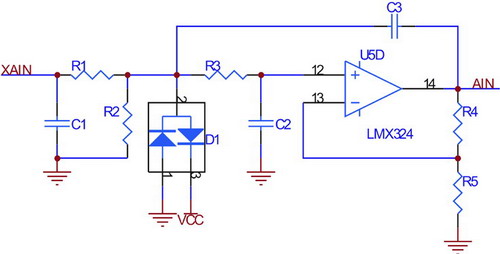
横摆角速度、纵向/横向加速度传感器的安装位置基本相同,输出都是0V-5V的模拟量,由于汽车颠簸造成的信号波动特性一致,故封装在同一模块中。其硬件接口如图8所示,实现硬件模拟前置滤波,以抑制来自传感器的模拟信号中的高频噪声成分,防止在采样过程中出现混叠现象。运放使用满摆幅输出的LMX324。
调整图8中各个阻容元件的参数,即可设置滤波截止频率和延时大小。汽车运行过程中,在较好路面上行驶时,由于信号较好,延时尽量要小,而在颠簸路面上行驶,则希望滤波效果要好。但是由于硬件滤波的频率特性一经设计完毕,无法实时修改,故需要在软件中设计数字滤波环节。数字滤波常用的有维纳滤波器、卡尔曼滤波器、线性预测器、自适用滤波器等。在这里选用计算量小、实时性能好的一阶低通滤波,传递函数为.
|
|
k的选择取决于当前的路面情况,而当前路面情况,则通过数字滤波前的原始信号来识别。微控制器把滤波后的信号、原始信号、k的值、路面识别结果打包后,通过CAN总线发送给ECU。图9a和9b分别为颠簸路面实车试验中采集得到的纵向加速度传感器的一组对比曲线。
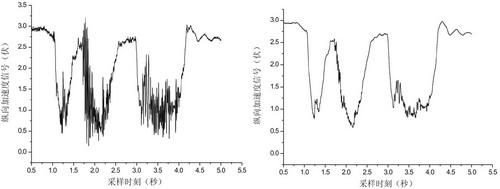
图9a 数字滤波前的数据曲线 图9b 数字滤波后的曲线
结语
本文讨论了ESP系统中常用传感器的结构特点及信号特性,并设计了各个传感器的信号处理接口,其中包括硬件接口电路以及软件处理方案。设计了包含横摆角速度、纵向/横向加速度传感器的集成模块,通过CAN总线与ECU进行数据传输,具有较好的抗干扰性和可靠性。本文的设计已经在实车试验中得到验证。
参考文献:
1. Anton T. Van Zanten, Rainer Erhardt, Klaus Landesfeind and Georg Pfaff, VDC systems Development and Perspective, SAE Paper 980235
2. Anton T. Van Zanten, Robert Bosch GmbH, Evolution of Electronic Control System for Improving the Vehicle Dynamic Behavior, AVEC'02, 20024481
3. Dongshin Kim, Kwangil Kim, Woogab Lee, Development of Mando ESP, SAE TECHNICAL PAPER SERIES, (SP-1781) 2003-01-0101
4. 陈在峰, 宋健, 于良耀. 汽车防抱死制动系统轮速传感器信号处理. 汽车工程. 2000(22),4:282-285.
5.74HC14 datasheet https://www.dzsc.com/datasheet/74HC14_99158.html.
3. LMX324 datasheet https://www.dzsc.com/datasheet/LMX324_844099.html.
版权与免责声明
凡本网注明“出处:维库电子市场网”的所有作品,版权均属于维库电子市场网,转载请必须注明维库电子市场网,https://www.dzsc.com,违反者本网将追究相关法律责任。
本网转载并注明自其它出处的作品,目的在于传递更多信息,并不代表本网赞同其观点或证实其内容的真实性,不承担此类作品侵权行为的直接责任及连带责任。其他媒体、网站或个人从本网转载时,必须保留本网注明的作品出处,并自负版权等法律责任。
如涉及作品内容、版权等问题,请在作品发表之日起一周内与本网联系,否则视为放弃相关权利。
- NOVOSENSE - 纳芯微推出车规级温湿度传感器NSHT30-Q1,助力汽车智能化发展2024/4/25 17:50:16
- Keysight - EV 电池设计创新:扩大续航里程、延长电池寿命2024/4/25 17:42:32
- TI - 微型隔离式直流/直流模块如何实现更高的功率密度2024/4/24 15:38:49
- 汽车以太网物理层调试的实用技巧2024/4/23 17:31:42
- 高频电力传输为电动汽车无线充电铺平道路2024/4/12 17:25:08



