





基于MM908E625和Low-G的汽车驾驶状态(疲劳驾驶)的监控
出处:张华 吴欣 发布于:2011-07-17 20:34:06
我国新的《道路交通法》中,为维护道路交通安全,也明文规定了对驾驶速度、连续驾驶时间等。国外一些交通运输发达国家也制定这方面的国家统一法规。疲劳驾驶是公路汽车驾驶特别是高速公路上的“隐形杀手”,据相关统计,从交通事故的大量分析中得出的结论认为:开车人因疲劳驾驶所造成的道路交通事故约占交通事故总数的20%。而疲劳驾驶在死亡交通事故的原因中却占22%-30%,在死亡交通事故的原因中居首位,由此可想疲劳驾驶对道路交通安全的危害性。
除法规建设外,国内外的汽车厂商也设计出各种仪器设备用于疲劳驾驶监控,一种针对疲劳驾驶的红外线眼球扫描仪在美国研制成功,这种眼球扫描仪外形如同一个小型摄像机,使用也很方便,只要把它安装在仪表盘上,让镜头对准司机,扫描仪就会连续发出红外线信号来扫描司机眼球中的眼白部分,同时判断出疲劳程度并发出“减速停车”、“休息一下”等警告信号。雷诺、尼桑等产业巨头长期研发克服疲劳驾驶一种监视系统,因理论技术应用缺陷仍无法商业推广。日本丰田公司研制的疲劳报警装置,只要驾驶员在操纵转向盘时有一点迟钝,或脉搏有一点异常变化,该装置就能测出这些反应,并发出警告,令座垫振动或自动刹车。
日本东京大学研制出的疲劳测试器,可戴在司机的手腕上。该测试器内部装有一小型氧气电池电极,能测量司机汗液中的乳酸、氨和酒精含量,然后通过小型无线电发射器把数据传送到研究中心。研究中心通过电脑分析,判定司机的疲劳程度,及时向司机发出警告,避免交通事故的发生。国内也有可有效预防驾驶员违章驾驶、遏制重大交通事故的“汽车行驶记录仪”通过鉴定的报道。
以上这些方法因这样或那样的问题,达到实用都存在一定的困难。随着电子技术的飞速发展ARCHEAN.net版权所有,通过采用的测试技术,结合嵌入式计算机、网络技术的应用,智能控制技术,对汽车疲劳驾驶状态进行监控,达到减少因疲劳驾驶造成的道路交通事故的目的。
设计概述
本设计的目标是应用现代电子技术的发展成果,用Motorola公司为第五届嵌入式微处理器“Freescale杯”提供的芯片和传感器,设计基于MM908E625和Low-G的汽车驾驶状态(疲劳驾驶)监控仪。
监控仪特性:
1.方向盘的转向轴、油门踏板和刹车踏板多点监控。
2.加速度传感器信号独立处理,确保实时性。
3.LIN总线网络,实现汽车中的分布式电子系统控制。
4.互动平台:驾驶路况选择,更有利于控制系统监控。提供声光、震动报警提示。
5.大容量数据存储和采集,大屏幕LCD显示,异动驾驶时间段数据查询。
6.神经元网络技术、模糊控制和系统。
汽车驾驶状态(疲劳驾驶)监控仪的基本思路是当驾驶员正常驾驶、短距离驾驶、短时间驾驶时,没有疲劳驾驶问题,这时监控仪的工作是对驾驶员的驾驶习惯进行数据搜集,建立驾驶习惯数学模型,并根据不断采集的数据进行修正。
随着连续驾驶时间的增加,监控仪自动进入疲劳驾驶监控状态,如果驾驶员有疲劳症状,必然会反映出与正常驾驶不同的偏差。如:突然急刹车的频率增加、连续大油门时的方向盘突然转向,油门踏板的平稳性变化等。结合神经元网络技术、模糊控制和系统,组成对驾驶员的驾驶状态的监控,增加与驾驶员的互动平台,向驾驶员提出驾驶指示、报警等。本人已在自己的自动波车上作过一些尝试,并取得成果。
加速度传感器Low-G分别被安装在方向盘的转向轴、油门踏板和刹车踏板上,由MCU/DSP嵌入式微处理器MM908E625对传感器的信号进行处理,并组成LIN总线网络。
传感器除了采用加速度传感器Low-G外,还需要速度和位置传感器。
硬件描述
1.硬件系统构成:
系统主节点为嵌入式PC机,配置PIII处理器、触摸屏提供交互式界面,主节点PC机完成数据库的建立、更新,智能控制程序运行和对LIN子节点的通讯管理。交互式界面提供路段、路况、测控时间等选择,对驾驶状态的等级提示和报警等。
主节点经过LIN接口板连接到四个LIN子节点,LIN子节点以MM908E625为,对加速度、发动机转速、车速、节气门开度和制动踏板位置等物理量进行检测和信号预处理,其中、二、三子节点对方向盘的转向轴、油门踏板和刹车踏板加速度传感器Low-G信号独立处理。第四个LIN子节点对发动机转速、车速、节气门开度和制动踏板位置,发动机转速、车速采用霍尔脉冲式传感器,节气门开度、制动踏板位置采用霍尔线性传感器。
实验表明:加速度信号更能反映汽车驾驶者在正常驾驶和疲劳驾驶时,对车辆的方向盘的转向轴、油门踏板和刹车踏板这三个关键部件的操控效果的不同,正常驾驶时加速度信号的输出电压在中心点电压±0.5V变化,而疲劳驾驶时加速度信号的输出电压在中心点电压±1V变化,且加速度信号变化的频度大于正常驾驶的情况。
第四个LIN子节点的测量信号作为模糊控制器的输入限定条件。
硬件系统结构框图如图(1)所示:
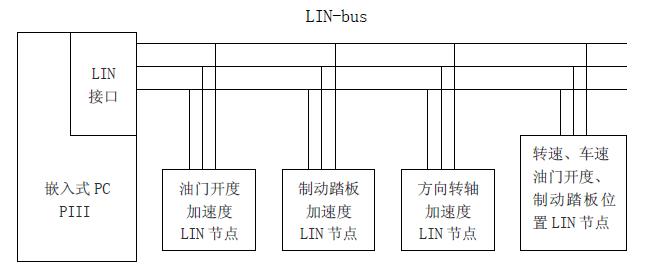
图(1)硬件系统结构框图
2.加速度计LIN子节点:
(1)。速度计LIN子节点原理图(2)及加速度测量模块图(3):
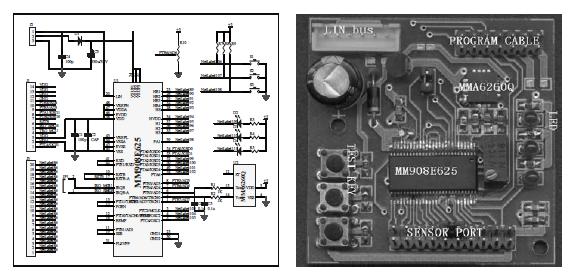
图(2)LIN子节点原理图 图(3)测量模块
(2)。加速度计LIN子节点的设计及结构安装:
MMA6260Q为XY双轴向传感器,为保证获得较理想的加速度测量,加速度计设计成带LIN接口,物理尺寸为5X5X2CM的测量模块,直接安装在油门开度踏板、制动踏板和方向转轴上。油门开度踏板和制动踏板测量模块垂直安装,确保X轴方向可测量踏板的加速度信号,Y轴方向测量车辆运行中平均震动信号。方向转轴测量模块水平安装,确保XY轴方向可测量方向盘转向的加速度信号。
3.传感器简介:
除用于加速度测量的Low-G外,还有以下传感器。
节气门(油门)开度传感器:节气门由驾驶员操纵,直接反映驾驶员的控制意图,因此是判断发动机工况的重要信号。节气门位置传感器安装在节气门轴的尾端,采用霍尔线性传感器。经传感器信号调理板处理后,由LIN子节点测量模块检测搜企网,节气门完全关闭时,传感器输出电压等于0V;节气门完全打开时,输出电压等于5V。当节气门不断开大时,其输出电压随之线形增加。
发动机转速、车速传感器:采用霍尔脉冲式。经传感器信号调理板脉冲整形电路处理之后,由主芯片的输入捕捉口进行脉冲捕捉。对应发动机转速1500rpm-8000rpm的范围,接口板输出对应0V-5V变化。对应车速60KM/h-180KM/h的范围,接口板输出对应0V-5V变化。
智能控制(模糊控制器)设计
汽车驾驶状态(疲劳驾驶)监控的对象是相当复杂的系统控制问题,是属于多输入-多输出的模糊控制系统范畴。人的驾驶习惯,不同的路况,不同驾驶时段反映到对车辆的操控,会产生相当不同的汽车驾驶状态。
各种对车辆的操控,作为输入量,表现为节气门(油门)开度、制动踏板的位置、发动机转速、车速的变化、速度的变化(即加速度),方向盘转向的角度和角加速度等。车辆在不同的路况下产生的震动作为输入量,也会影响到传感器的测量,特别是对加速度传感器的影响,对震动信号由LIN子节点测量模块按“平均震动信号强度”在信号预处理程序中减弱或消除。作为输出量,表现为对车辆的驾驶状态的优劣,分为“好”、“中”、“差”三个等级。在设计控制规则库时,把多输入-多输出模糊控制结构化为多输入-单输出模糊控制结构,然后按单输入-单输出模糊控制系统的方法设计,实现多变量控制系统的模糊解耦。
实验数据表明,疲劳驾驶阶段,反映到汽车驾驶状态上,表现为对节气门(油门)开度、制动踏板和方向盘转向的加速度信号的改变比正常驾驶时期的加速度信号的改变在信号的幅值和频度有明显的不同。本课题采用FreeScale的Low-G系列双轴向加速度传感器MMA6260Q,对所需的加速度信号能准确地、实时地采集,作为模糊控制器的输入变量的一个重要参数。
本研究课题早期对疲劳驾驶的研究主要通过测量油门开度、制动踏板位置和发动机转速、车速的变化等参数,这些参数间接地、滞后地反映驾驶状态的变化,这些参数可作为模糊控制器在各种不同驾驶状态的限定条件,结合加速度的测量,建立模糊控制规则。
对应于油门开度、制动踏板位置和方向盘转向轴三种类型的变量建立三套模糊控制器模型,以下以油门开度作为变量说明模糊控制器的设计。
1.糊化过程:
设油门开度模糊控制的输入量分别为油门开度s,发动机转速n、车速v和油门开度加速度a。将加速度划分成“负大NB”、“负小NS”、“零ZE”、“正小PS”、“正大PB”五个等级(即五个模糊子集)。控制器的输出为对车辆的驾驶状态的优劣(以H表示),分为“好GOOD”、“中MIDDLE”、“差BAD”三个等级。为了实现模糊化,确定油门开度加速度a模糊子集的隶属度函数如下图(4)所示。为了按照一定的语言规则进行模糊推理,确定输出量即反映驾驶状态的优劣的隶属度函数如下图(5)所示。
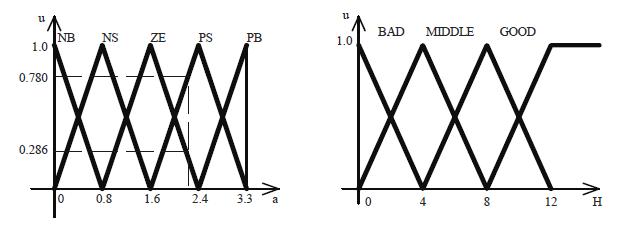
图(4)加速度a隶属度函数图 图(5)驾驶状态隶属度函数图
2.模糊控制规则的建立:
对应于油门开度模糊控制规则库的建立,与油门开度s,发动机转速n、车速v在不同的数值范围的取值具有交互性和关联性。规则库的建立需要在程序运行中不断搜集数据,通过自学习确定方法和模糊规则的自调整,在实验过程中不断修正和完善。
模糊控制规则重点处理影响车辆驾驶状态的优劣“差”和“中”的工作过程。其中,“差”驾驶状态的规则对应于油门开度s分为0,1,2-9共十段,发动机转速n分为1000rpn、1500rpn-5500rpm共十段,车速v分为60km/h、70km/h-150km/h共十段,和加速度划分成“负大NB”、“负小NS”、“零ZE”、“正小PS”、“正大PB”五个等级,可归纳为有效控制规则八十六条规则。
模糊控制规则(L)公式:如果(IF)油门开度s为x段[和(AND)]V[或(OR)]发动机转速n为y段[和(AND)]V[或(OR)]车速v为z段,且加速度为等级m,则(THEN)驾驶状态为“S”。
3.化计算:
对应于上述推理方法得到的结果,结合车辆正常驾驶时采集的数据建立的数据库分析,对加速度等级出现的频度,根据输出模糊子集的隶属度函数进行化计算,确定车辆驾驶状态的优劣“差”和“中”,由交互界面提供操作提示和报警。
软件描述
1.数据库建立:
驾驶状态模糊控制器数据库的建立和数据更新是本课题设计的重要部分SOOQ.cn版权所有,汽车正常驾驶时,系统设定为连续驾驶的前两个小时为正常驾驶,在这段时间内监控仪的工作是对驾驶员的驾驶习惯进行数据搜集,按设定量化等级作数据的线性化量化,对应于油门开度、制动踏板位置和方向盘转向轴三种类型的变量的不同量纲,按比例因子对数据处理,依据模糊子集的隶属度函数模糊化数据。
为了消除大的误差,在量化级之间采用插值运算,引入权系数因子w(。),对于任意一个连续的测量值通过相邻的两个离散的加权运算得到模糊度的值。在模糊化数据建立数据库的基础上,生成正常驾驶习惯数学模型,并根据不断采集的数据进行修正。随着连续驾驶时间的增加(大于两个小时或采集数据的变化超出驾驶状态监控指标),监控仪自动进入疲劳驾驶监控状态。
2.软件框图
(1)。PC机程序设计:
PC机程序用C语言编写,完成数据库的建立和维护、对LIN-BUS网络的管理、模糊控制器算法和规则的运算、交互界面的输入输出控制。软件框图如图(6)所示。
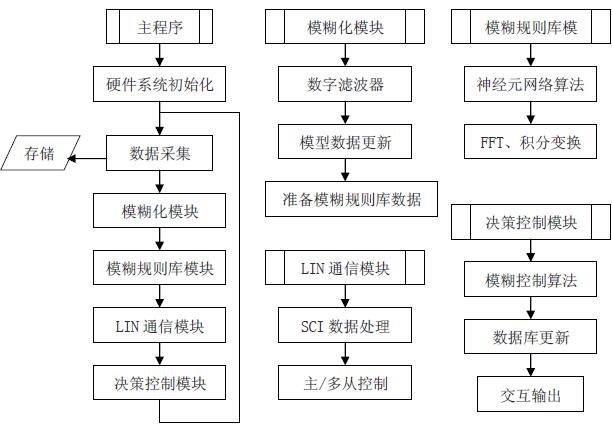
图(6)PC机软件框图
(2)。测量模块程序设计:
测量模块是以MM908E625单片机为的数据采集器,程序用CodeWarrior3.1CW-HC083.0设计,测量模块软件框图如图(7)所示。

图(7)测量模块软件框图
结论
智能控制技术应用于汽车疲劳驾驶监控课题是一个相当复杂和具有相当难度的研究方向,通过对LIN-BUS网络的研究,以MM908E625、Low-G加速度传感器和其他传感器与嵌入式PC机建立起这样一个硬件平台,实现对汽车驾驶状态在正常驾驶、短距离驾驶、短时间驾驶的数据库的建立,规则库数据的修正,疲劳驾驶状态监控。对油门开度、制动踏板位置和方向盘转向轴等三种主要影响驾驶状态的因数,设计出模糊控制器,从理论和硬件实现两方面做了有益的探讨,虽然离实际应用和产业化有一定的距离,但是为进一步完善该系统的设计打下了良好的基础。
参考文献:
[1]. MM908E625 datasheet https://www.dzsc.com/datasheet/MM908E625_873234.html.
[2]. MMA6260Q datasheet https://www.dzsc.com/datasheet/MMA6260Q_484890.html.
版权与免责声明
凡本网注明“出处:维库电子市场网”的所有作品,版权均属于维库电子市场网,转载请必须注明维库电子市场网,https://www.dzsc.com,违反者本网将追究相关法律责任。
本网转载并注明自其它出处的作品,目的在于传递更多信息,并不代表本网赞同其观点或证实其内容的真实性,不承担此类作品侵权行为的直接责任及连带责任。其他媒体、网站或个人从本网转载时,必须保留本网注明的作品出处,并自负版权等法律责任。
如涉及作品内容、版权等问题,请在作品发表之日起一周内与本网联系,否则视为放弃相关权利。
相关技术资料
- EPS Global - 谁需要嵌入式安全?2024/4/22 15:39:31
- 什么是嵌入式SoC2024/4/3 16:20:28
- EasyARM-i.MX283(7)A 默认供电方案2024/3/28 17:39:53
- EasyARM-i.MX283(7)A 的快速入门2024/3/27 17:29:30
- 非线性数字滤波器:用例和示例代码2024/3/14 16:34:20
技术分类
广告

热门技术资料
最新技术资料
- 英特尔数据存储如何操作和实现
- 什么是微动开关_微动开关有什么用_微动开关使用方法
- VCC,VDD,VEE,VSS在电源原理图中有什么区别?
- 低压配电系统设计规范_低压配电系统设计注意事项
- xEV 主逆变器电源模块中第四代 SiC MOSFET 的短路测试
- 光耦详细应用教程
- 定义绝缘耐久性评估的电压脉冲测试要求
- 采用沟槽MOS结构,使存在权衡关系的VF和IR相比以往产品得到显著改善 ROHM推出实现业界超快trr的100V耐压SBD“YQ系列”
- NOVOSENSE - 纳芯微推出车规级温湿度传感器NSHT30-Q1,助力汽车智能化发展
- Keysight - EV 电池设计创新:扩大续航里程、延长电池寿命


