





基于FPGA+DSP的视频控制的智能交通灯设计
出处:维库电子市场网 发布于:2018-01-09 15:21:00
智能交通灯是未来交通管理和车流量控制的发展方向,通过它可以更高效地对交通流进行限制、调整、疏导以改善通行效率、保障交通安全。
本设计通过综合目前各种交通灯的利弊,针对国内车辆种类多、随机性大、影响因素多等实际情况,提出1套完整的新型的基于视频监控的智能交通灯设计方案,该交通灯由视频采集、图像处理和控制模块组成,使用FPGA搭建专用高速视频采集模块,使用DSP处理器进行实时图像运算,通过图像算法提取车流量信息,终结合模糊算法实现智能控制。
1、系统设计概述
本系统完成了1种新型智能交通灯的设计,分为视频采集模块、视频分析模块和控制模块3部分,该系统把精简性、高效性、智能性和实用性进行了极大的集成。其系统结构框图如图1所示。视频采集模块以FPGA为,其高速并行的逻辑运算能力用于控制CMOS图像传感器的时序,并高效地存储和传输图像数据。
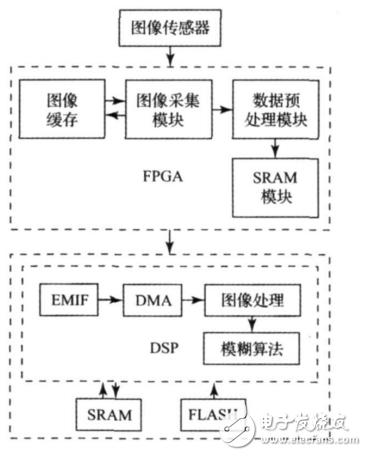
图1 系统结构
图像处理模块以DSP为,其丰富的硬件运算部件和加强的CPU多总线结构用来实时处理图像数据、分析交通流量状态。
控制模块主要由软件控制算法和DSP端口组成,这种预留的控制接口外接上不同的驱动电路即可控制不同规格的信号灯。
2、视频采集模块
视频采集模块结构框图如图2所示。整个模块以FPGA为,外围扩展了CMOS图像传感器以及SDRAM存储器。
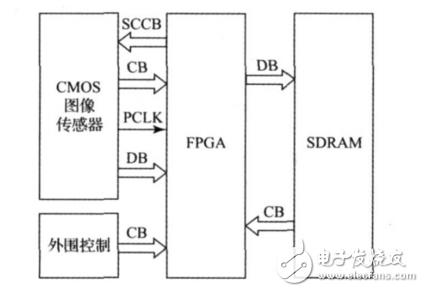
图2 视频采集模块结构
CMOS图像传感器OV7660的控制信号端和数据信号端直接与FPGA相连,通过近400个状态机完成OV7660各类指令的时序操作。为了协调各模块的处理速率,采集过程以帧为单位对图像数据进行缓存,在SDRAM中开辟缓存空间存储当前帧和前一帧,在当前帧写入的时候进行前一帧读取。
DSP通过EMIF接口将FPGA模拟为外部SRAM进行图像帧的读取。使用定时器控制DMA将图像数据送入图像处理模块。
该信号链路精简高效,极大地发挥了FPGA时序控制优势,并通过优化缓存方案提高了数据传输的稳定性,为后端图像数据分析打下了坚实的基础。
3、图像处理模块
车流检测是智能交通系统的重要组成部分。通过视频图像来分析车流相比其他方式具有更大的优势,如成本低、系统精简、适应性强、扩展性强等。图像处理模块的主要目标是实现前景分离,即分离出静止的背景和相对运动的车辆。
传统的运动目标检测方法有光流法、帧间差分法和背景差分法。背景差分法是目前常用的1种前景检测方法,背景差分法通过当前帧减去背景参考帧,然后对差分图像选择合适的阈值二值化后,就得到了运动目标。
背景差分法检测运动目标的效果在很大程度上取决于背景图像的质量。背景图像会随着光照和其他因素而变动,背景差分法的关键在于找到1个背景模型的自适应更新算法。本系统采用均值法获取初始背景图像,利用卡尔曼滤波原理建立背景模型,OTSU算法进行图像的二值化分割。图像处理模块结构框图如图3所示。
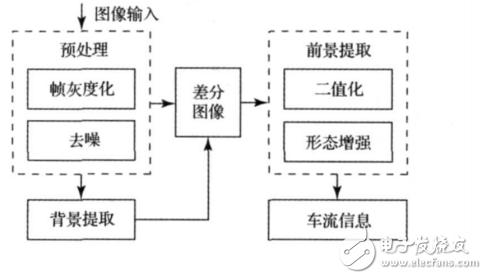
图3 视频图像处理流程
3.1、帧灰度化
DSP从双口RAM中读到16位RGB565格式的彩色图像数据,为了提高图像处理的速度同时保留图像的大部分细节,可以提取图像中的亮度信息,将图像转换为YUV格式。其中亮度信息:
Y=0.299xR+0.587xG+0.114xB
处理效果如图4(b)所示。
3.2、去噪
摄像头采集到的原始图像通常包含椒盐噪声和白噪声。椒盐噪声是由传感器,传输信道等引起的噪点,白噪声是频率意义上的随机信号干扰,服从高斯分布。为了提高后续处理效果,必须对原始图像进行去噪处理。去噪操作同时会一定程度降低图像质量,所以在方法选择上应适度权衡。
本系统采用3x3滑动窗口中值滤波进行去噪处理,其去噪效果明显且能较好保存图像边缘。虽然中值滤波执行效率一般,但经优化后对实时性影响甚微。
将3x3的数据序列分为3组分别排序,获得值组、中值组、值组,然后在值组的值、中值组的中值和值组的值3个值中取中值,结果即为序列的中值。处理效果如图4(c)所示。
3.3、背景提取与更新
常用的目标检测算法主要有:光流法、帧差法、背景差分法。光流法计算复杂度高,主要用在有硬件支持和场合;帧差法运算速度快且适应性强,但对于不同速度的物体容易出现前景空洞现象,影响准确性;背景差分法的思想为分离静态背景和动态前景,通过背景帧和当前帧个像素的差分来提取前景。
本系统采用卡尔曼滤波思想建立背景模型,提取和更新背景。卡尔曼滤波是根据过去的信号,利用统计估计理论,并使用线性均方误差作为准则,预测将来某个时刻的值。初始背景通过多帧平均求得。背景更新的迭代公式为:
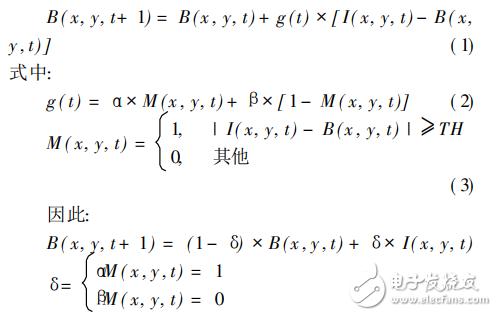
式中:B(x,y,t)为当前背景,B(x,y,t+1)是对下一帧背景的预测,I(x,y,t)是输入图像,M(x,y,t)是前景的二值化图像,TH为分割阈值。根据卡尔曼滤波理论,以上计算将预测值和1个相关项来计算出新的背景估计。背景提取效果如图4(d)所示。
3.4、前景提取及增强
二值化操作由差分图像获取前景目标,由于光线和环境因素的影响,固定阈值法不能适应多变的现场,本系统采用OTSU方法进行自适应阈值分割。OTSU方法的基本思想是选取的阈值T应该使得不同类之间的分离性。
经典OTSU方法法在没有前景或者前景与背景灰度较接近时,阈值会趋近极小值而出现误判。对此本系统将差分图像进行灰度拉伸,即将每个像素的灰度值扩大一定倍数,加大背景和前景的灰度差,便于对黑色车辆的分割;同时对阈值下限进行处理,以避免没有车辆时出现误判。二值化效果如图4(e)所示。
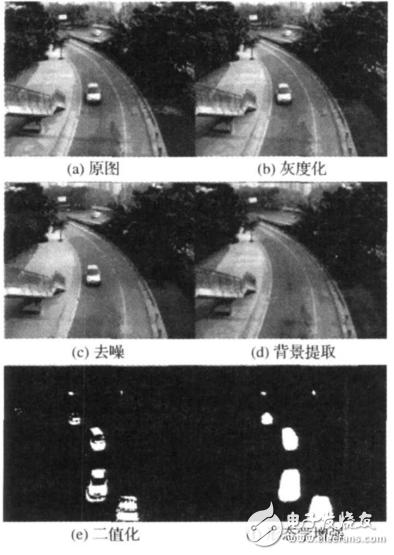
图4 视频图像处理效果
由于一些不定因素的影响,二值图中存在以下2点缺陷:一是背景环境中有噪点干扰;另一是前景未提取完全,存在空洞现象。为了弥补以上缺陷,使后续模块能更好的得到车流信息,使用形态学方法来增强二值图像,针对白色像素,先膨胀后腐蚀,即可消除一定大小范围内的背景噪声和前景空洞。膨胀和腐蚀像素范围都设置成2时的结果如图4(f)所示。
3.5、提取车流信息
本系统需要得到的车流信息为红灯时每一相位上等待的车流量和绿灯时每一相位通行的车流量,以此为基础进行交通灯的智能控制。红灯时每一相位等待的车流量通过统计二值图像中前景的面积,根据相应的上下限范围得到车流量。
绿灯时每一相位通行的车流量通过分析警戒线后矩形区域内二值图像的面积变化得出。当矩形内前景面积由小到大大于某一阈值再减小视为检测到一辆车通过。
4、交通灯的模糊控制
对单交叉口的信号灯进行控制,主要是寻找信号周期和各相位的绿信比,使交叉口排队长度尽可能短,车辆平均延误尽可能小。
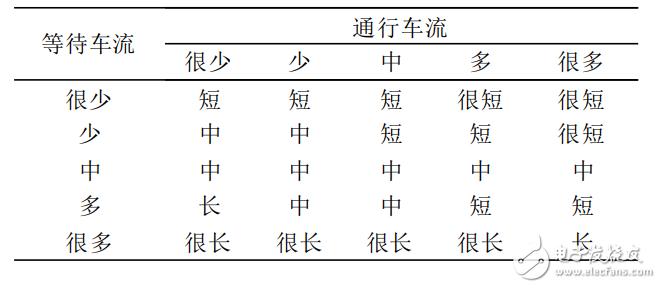
模糊控制器的输入此时为红灯相位上等待的车流量和绿灯相位上通行的车流量,输出为下一周期亮红灯的时间。车流量的模糊集合取5个等级,隶属函数如图5所示。模糊规则的制定原则是使通行的车流量,同时使等待的时间不至于过长。模糊规则如表1所示。
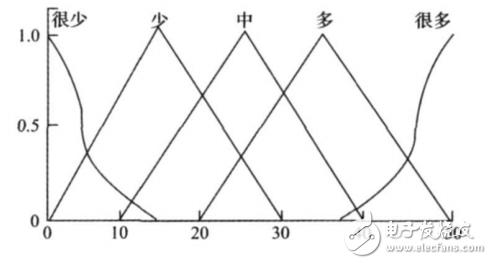
图5 车流量隶属函数
5、结论
本设计以FPGA为搭建专用高速视屏传输通道,通过DSP实时视频处理得出车流信息,再通过模糊控制原理生成单相交通灯控制字,实现交通灯的智能控制。
上一篇:dsp芯片可分为哪几个存储区
版权与免责声明
凡本网注明“出处:维库电子市场网”的所有作品,版权均属于维库电子市场网,转载请必须注明维库电子市场网,https://www.dzsc.com,违反者本网将追究相关法律责任。
本网转载并注明自其它出处的作品,目的在于传递更多信息,并不代表本网赞同其观点或证实其内容的真实性,不承担此类作品侵权行为的直接责任及连带责任。其他媒体、网站或个人从本网转载时,必须保留本网注明的作品出处,并自负版权等法律责任。
如涉及作品内容、版权等问题,请在作品发表之日起一周内与本网联系,否则视为放弃相关权利。
- 模糊逻辑在 DSP 上实时执行2023/7/25 17:13:30
- 多速率DSP及其在数模转换中的应用2023/6/12 15:28:52
- 使用 DSP 加速 CORDIC 算法2023/3/29 15:46:30
- 高速DSP系统的信号完整性2022/9/26 16:45:38
- 自适应噪声消除系统的实现2022/1/17 17:51:17

- 英特尔数据存储如何操作和实现
- 什么是微动开关_微动开关有什么用_微动开关使用方法
- VCC,VDD,VEE,VSS在电源原理图中有什么区别?
- 低压配电系统设计规范_低压配电系统设计注意事项
- xEV 主逆变器电源模块中第四代 SiC MOSFET 的短路测试
- 光耦详细应用教程
- 定义绝缘耐久性评估的电压脉冲测试要求
- 采用沟槽MOS结构,使存在权衡关系的VF和IR相比以往产品得到显著改善 ROHM推出实现业界超快trr的100V耐压SBD“YQ系列”
- NOVOSENSE - 纳芯微推出车规级温湿度传感器NSHT30-Q1,助力汽车智能化发展
- Keysight - EV 电池设计创新:扩大续航里程、延长电池寿命


