




单片机12V数控电源
出处:21ic 发布于:2018-07-06 11:41:53
这次做的数控电源设计思想没什么新意,就是一个数模转换(ADC0809)和一个模数转换(DAC0832),再加上两个单片机分别控制0809和0832,组成一个反馈网络,来得到输入的数字相对应的电压,电压范围很小,只有0~12.75V.显示部分采用四段共阴数码管
整块板子做出来之后有10*7cm那么大,用洞洞板焊的.
实测电路输出+/-0.05V在12V范围内.

硬件设计:
块单片机P0口接数码管代码段的驱动,P2.4~P2.7接四位的位选线,P2.0~P2.3节四个独立操作按键[模式][加][减][确定],P1口接ADC0809的八位数据输出.P3.0~P3.3口接0809的控制线.P3.5~P3.7和第二块单片机的P2.0,P2.1,P2.2相连,用来控制数模输出增减.三根控制线作用分别为[输出改变允许控制Control_1][增减信号Control_2][增减速度控制Control_speed]
第二块单片机除了前面的三根控制线,就只剩下和DAC0832的控制线了,看电路图.

用0832输出控制LM317可调三端稳压器的输出电压:

DAC0809所需时钟脉冲由NE555产生
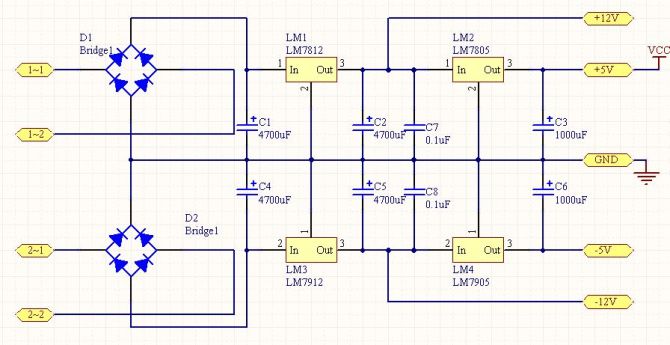
系统电源:5V12VGND-12V
程序清单:块单片机:(接0809,四段数码管,四个独立按键)
#include
#defineucharunsignedchar
inti=0,a=0;//定义循环算子
ucharhold=5;//当前操作数[0-led1][1-led2][2-led3][3-led4][4-快速调节][5-无]
ucharGet_data=0;//模数转换得到的结果
intGet_data2=0;//将Get_data*5用以方便转化(做电压表时用)//ucharled[]={0x3F,0x06,0x5B,0x4F,0x66,0x6D,0x7D,0x07,0x7F,0x6F,0x00};//阳极驱动不带小数点
ucharled[]={0xC0,0xF9,0xA4,0xB0,0x99,0x92,0x82,0xF8,0x80,0x90,0xFF};//阴极驱动
//ucharpoint[]={0xBF,0x86,0xDB,0xCF,0xE6,0xED,0xFD,0x87,0xFF,0xEF,0x00};//阳极驱动带小数点
ucharpoint[]={0x40,0x79,0x24,0x30,0x19,0x12,0x02,0x78,0x00,0x10,0xFF};
ucharV_list[]={30,36,60,66,90,100,120,180,240};//电压值列表
ucharV_index=6;//预置电压索引.ucharnum[4]={10,5,0,0};//显示缓存
ucharV_num=100;//显示的电压对应在0~255电之间的值,预置压数5V
uchartime=0;//控制模数转换频率变量
uchartimes=0;//控制按键允许速度变量
ucharscan_grant=1;//允许输入
ucharhide_flag=0;//隐藏标志[0隐藏][1显示]和hold配合用于控制某一位数码管的亮灭
ucharhide_time=0;//用于控制数码管闪烁快慢
//ucharzhengshu,xiaoshu_1,xiaoshu_2;voiddelay(ints);
voidkey_mode();
voidkey_add();
voidkey_sub();
voidkey_confirm();
voiddisplay();
voidADC();
voidconvert();//将get_data填入到num[]数组中
voidscan_key();//键盘扫描函数
voidcompare();//比较函数(Control_1Control_2)[00-正确][11-加][10减]//定义位选线
sbitled_1=P2^7;
sbitled_2=P2^6;
sbitled_3=P2^5;
sbitled_4=P2^4;
sbitmode=P2^0;
sbitadd=P2^1;
sbitsub=P2^2;
sbitconfirm=P2^3;
//0809四根控制线
sbitALE=P3^0;
sbitSTART=P3^1;
sbitOE=P3^2;
sbitEOC=P3^3;
//两根控制线
sbitControl_1=P3^6;//变化控制线[1变化][0不变]
sbitControl_2=P3^7;//增减控制线[1增][0减]
sbitControl_speed=P3^5;//控制变化速度
sbitclose=P3^4;//当电压稳定时为0;voidmain()
{
//初始化
led_1=0;
led_2=0;
led_3=0;
led_4=0;
//初始化定时器
TMOD=0x01;//定时器0,方式1
TH0=0x3c;
TL0=0xb0;
ET0=1;//允许定时器0中断
TR0=1;//启动定时器0运行
EA=1;//全部中断允许
Control_1=0;
Control_2=0;
while(1)
{
time++;
if(time>=10)
{
time=0;
//扫描键盘
if(hold==5)
{
ADC();//模数转换
compare();//转换结果比较,修改控制变量
}
else
{
Control_1=0;
Control_2=0;
}
}
if(scan_grant==0)
{
scan_key();
convert();
scan_grant=1;
EA=1;
}
hide_time++;
if(hide_time>=80)
{
hide_time=0;
if(hide_flag==1)
{hide_flag=0;}
else
{hide_flag=1;}
}
display();
}
}
//延时函数
voiddelay(ints)
{
for(i=0;i{}
}
//按键处理------------------------------------
voidkey_mode()
{
delay(1000);
if(mode==0)
{
hold++;
if(hold>=6)
{hold=1;}
}
}
voidkey_add()//加函数
{
delay(1000);
if(add==0)
{
if(hold==0)//当前操作数[0-led1即num[0]]
{
}
if(hold==1)//当前操作数[1-led2即num[1]]
{
if(V_num<=235)
{V_num=V_num+20;}//加1V
}
if(hold==2)//当前操作数[2-led3即num[2]]
{
if(V_num<=253)
{V_num=V_num+2;}//加0.1V
}
if(hold==3)//当前操作数[3-led4即num[3]]
{
if(V_num<=254)
{V_num++;}//加0.05V
}
if(hold==4)//当前操作数[4-快速调节即V_index]
{
if(V_index<=7)
{V_index++;}
V_num=V_list[V_index];
}
if(hold==5)//当前操作数[5-无]
{
}
}
}
voidkey_sub()//减函数
{
delay(1000);
if(sub==0)
{
if(hold==0)//当前操作数[0-led1即num[0]]
{
}
if(hold==1)//当前操作数[1-led2即num[1]]
{
if(V_num>=20)
{V_num=V_num-20;}//减1V
}
if(hold==2)//当前操作数[2-led3即num[2]]
{
if(V_num>=2)
{V_num=V_num-2;}//减0.1V
}
if(hold==3)//当前操作数[3-led4即num[3]]
{
if(V_num>=1)
{V_num--;}//减0.05V
}
if(hold==4)//当前操作数[4-快速调节即V_index]
{
if(V_index>=1)
{V_index--;}
V_num=V_list[V_index];
}
if(hold==5)//当前操作数[5-无]
{
}
}
}
voidkey_confirm()
{
delay(1000);
if(confirm==0)
{
hold=5;
}
}
//-------------------------------------------------------------
voiddisplay()
{
/*led_1=1;
if(num[0]==0)//如果位是0的话就不显示,led[10]是空
{P0=led[10];}
else
{P0=led[num[0]];}delay(100);
led_1=0;
P0=0xFF;led_2=1;
P0=point[num[1]];
delay(100);
led_2=0;
P0=0xFF;led_3=1;
P0=led[num[2]];
delay(100);
led_3=0;
P0=0xFF;led_4=1;
P0=led[num[3]];
delay(100);
led_4=0;
P0=0xFF;*/
if(hide_flag==1)
{
if(hold==4)
{
delay(400);
return;
}
if(hold!=1)
{
led_1=1;
if(num[0]==0)//如果位是0的话就不显示,led[10]是空
{P0=led[10];}
else
{P0=led[num[0]];}
delay(100);
led_1=0;
P0=0xFF;
led_2=1;
P0=point[num[1]];
delay(100);
led_2=0;
P0=0xFF;
}
if(hold!=2)
{
led_3=1;
P0=led[num[2]];
delay(100);
led_3=0;
P0=0xFF;
}
if(hold!=3)
{
led_4=1;
P0=led[num[3]];
delay(100);
led_4=0;
P0=0xFF;
}
}if(hide_flag==0)
{
led_1=1;
if(num[0]==0)//如果位是0的话就不显示,led[10]是空
{P0=led[10];}
else
{P0=led[num[0]];}
delay(100);
led_1=0;
P0=0xFF;
led_2=1;
P0=point[num[1]];
delay(100);
led_2=0;
P0=0xFF;
led_3=1;
P0=led[num[2]];
delay(100);
led_3=0;
P0=0xFF;
led_4=1;
P0=led[num[3]];
delay(100);
led_4=0;
P0=0xFF;
}
}
voidADC()
{
START=0;
OE=0;
START=1;
delay(65);
START=0;
while(EOC==1)
{}
OE=1;
delay(65);
Get_data=P1;
OE=0;
//convert();
}
voidconvert()
{
//基准电压要为12.8V
/*Get_data2=Get_data*5;
num[0]=Get_data2/1000;
Get_data2=Get_data2%1000;
num[1]=Get_data2/100;
Get_data2=Get_data2%100;
num[2]=Get_data2/10;
Get_data2=Get_data2%10;
num[3]=Get_data2;*/
Get_data2=V_num*5;
//Get_data2=Get_data*5;
num[0]=Get_data2/1000;
Get_data2=Get_data2%1000;
num[1]=Get_data2/100;
Get_data2=Get_data2%100;
num[2]=Get_data2/10;
Get_data2=Get_data2%10;
num[3]=Get_data2;
}
voidscan_key()//键盘扫描后函数分配
{
if(mode==0)
key_mode();
if(add==0)
key_add();
if(sub==0)
key_sub();
if(confirm==0)
key_confirm();
}voidcompare()//比较函数(Control_1Control_2)[00-正确][11-加][10减]
{
Control_1=0;
Control_2=0;if(V_num<(Get_data-1))
{
Control_1=1;
Control_2=0;
if((Get_data-V_num)>=10)
{
Control_speed=1;
close=1;
}
else
{
Control_speed=0;
close=0;
}
}
if(V_num>(Get_data+1))
{
Control_1=1;
Control_2=1;
if((V_num-Get_data)>=10)
{
Control_speed=1;
close=1;
}
else
{
Control_speed=0;
close=0;
}
}
}
//中断函数:
//定时器中断T0用于消除按键等待
//定时器中断T1用于进入AD转换函数
//--------------------------------------------------------------------
//-------------------------定时器中断服务程序-------------------------
//--------------------------定时器0工作方式1--------------------------
//任务:
//1:限定进入按键扫描程序的时间间隔,避免在短时间内多次进入键盘扫描而造成误操作
//--------------------------------------------------------------------
voidclear_key()interrupt1using1
{
times=times+1;
if(times==7)//这个数字决定了按键上限速度.
{
times=0;
scan_grant=0;//允许输入
EA=0;
}
TH0=0x3c;//计数器初值重载
TL0=0xb0;
}
第二块单片机(接0832)
#include
#defineucharunsignedchar
inti;
sbitCS12=P3^0;//控制线
sbitWR12=P3^1;//控制线
sbitled=P2^2;//控制led亮灭
sbitControl_1=P2^1;//变化控制线1[1变化][0不变]
sbitControl_2=P2^0;//加减控制线2[1增][0减]
sbitControl_speed=P2^3;//变化速度控制
ucharout=0;//输出数据
uchara=0;
voiddelay(ints);
voidmain()
{
P1=0;
WR12=0;
CS12=0;
Control_1=1;
Control_2=1;
Control_speed=1;
while(1)
{
for(a=0;a<=20;a++)
{
delay(1000);
}
//根据控制信号线决定加减.
if(Control_1==1)
{
if(led==0)
{led=1;}
else
{led=0;}
if(Control_2==1)
{
if(out<=254)
if(Control_speed==0)
{out++;}
if(Control_speed==1)
{out=out+10;}
}
if(Control_2==0)
{
if(out>=1)
if(Control_speed==0)
{out--;}
if(Control_speed==1)
{out=out-10;}
}
//写操作
WR12=0;
CS12=0;
P1=out;
delay(100);
CS12=1;
WR12=1;
}
if(Control_1==0)
{
led=1;
}
/*if(out>=255)
{out=255;}
if(out<=1)
{out=0;}*/
}
}
voiddelay(ints)
{
for(i=0;i{}
}
上一篇:AVR单片机下载烧录快速入门
下一篇:stc单片机adc程序
版权与免责声明
凡本网注明“出处:维库电子市场网”的所有作品,版权均属于维库电子市场网,转载请必须注明维库电子市场网,https://www.dzsc.com,违反者本网将追究相关法律责任。
本网转载并注明自其它出处的作品,目的在于传递更多信息,并不代表本网赞同其观点或证实其内容的真实性,不承担此类作品侵权行为的直接责任及连带责任。其他媒体、网站或个人从本网转载时,必须保留本网注明的作品出处,并自负版权等法律责任。
如涉及作品内容、版权等问题,请在作品发表之日起一周内与本网联系,否则视为放弃相关权利。
- 51单片机中的STC89C522024/9/5 17:57:34
- 单片机Hex文件的格式详解2024/8/22 17:28:29
- STC89C52单片机的原理及应用2024/8/20 17:40:22
- 单片机的概念/组成/分类/应用2024/7/23 17:37:27
- Microchip 发布PIC16F13145系列MCU,促进可定制逻辑的新发展2024/4/23 15:34:17



