





运算放大器会发生振荡的两种常见原因
出处:面包板 发布于:2019-06-06 14:40:53
虽然 Bode 图是一种很不错的分析工具,但是您可能没有还发现该图太过直观了。就运算放大器不稳定和振荡而言,Bode 图这是对常见原因的一种直观表述。
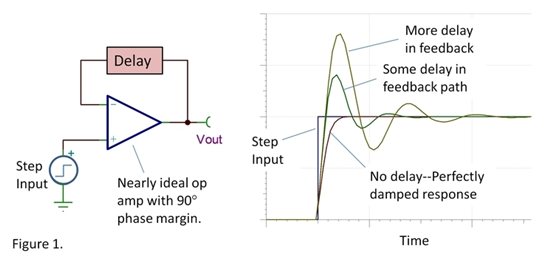
在反馈信号到达反相输入端时就会发生如图 1 中所示的完美的无延迟阻尼响应。运算放大器通过斜坡至终阈值并在反馈信号检测到在适当输出电压时的闭合缓缓下降来进行响应。
当反馈信号延迟的时候问题就会进一步恶化。由于在环路中有延迟,放大器无法立即检测到其达到终阈值的进程,进而以过快地向正常输出电压移动的形式表现为过响应。请注意延迟反馈越多初斜率也就越快。反相输入无法及时接收到其已经达到并传递出正常输出电压的反馈。其将过冲目标并在终建立时间前需要诸多连续的极性纠正。
如果是少量的延迟,您可能只是看到了一些过冲和振铃。如果是大量的延迟,那么这些极性纠正就会永无休止——进而形成振荡器。
延迟的根源通常是一个简单的低通 R-C 网络。就所有频率而言,这虽然不是一个恒定的延迟,但是该网络从 0° 到 90° 的逐渐相移会产生一个一阶逼近的时延,td=RC。
常见的有两种情况,R-C 网络不经意间就会在我们的电路中形成。种情况是容性负载(请参见图 2a)。电阻就是运算放大器的开环输出电阻,当然电容器就是负载电容了。
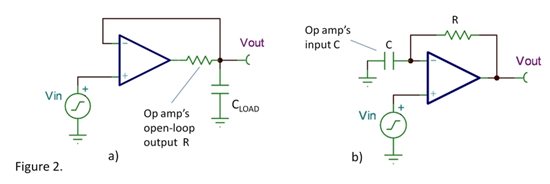
第二种情况是(请参见图2b)反馈电阻和运算放大器的输入电容形成了 R-C 网络。在这个敏感的电路节点电路板连接也是电容的重要因素。请注意这两个电路具有相同的反馈环路,不同的是输出的节点不同。从环路稳定性的角度来说,他们会产生同样的问题。延迟反馈的这两个因素通常都会起作用——如果两个因素同时作用的话会带来更大的麻烦。
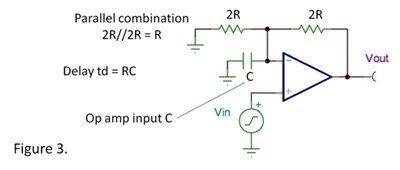
对于第二种情况需要作一点点解释:就简单的 G=1 缓冲器而言通常不需要反馈电阻,因此更为常见的一种情况是在使用了一个反馈电阻和电阻接地的增益结构中(请参见图 3)。R/C 电路中的这些并联的电阻就形成了高效的 R。
关于反馈放大器的 Bode 分析我们还有很多要学习的方面。因此该有关反馈路径中的延迟或相移如何影响稳定性的简单直观表述有助于您诊断并解决一些常见的稳定性问题。
版权与免责声明
凡本网注明“出处:维库电子市场网”的所有作品,版权均属于维库电子市场网,转载请必须注明维库电子市场网,https://www.dzsc.com,违反者本网将追究相关法律责任。
本网转载并注明自其它出处的作品,目的在于传递更多信息,并不代表本网赞同其观点或证实其内容的真实性,不承担此类作品侵权行为的直接责任及连带责任。其他媒体、网站或个人从本网转载时,必须保留本网注明的作品出处,并自负版权等法律责任。
如涉及作品内容、版权等问题,请在作品发表之日起一周内与本网联系,否则视为放弃相关权利。
- BiCMOS 运算放大器的知识2024/4/16 17:41:17
- 模数转换 – 性能标准2024/4/8 16:37:02
- 解析 PWM (DAC) 性能:第 4 部分 – 非均匀占空比组2024/3/28 17:23:37
- 了解运算放大器的输出信号摆幅2024/3/18 16:29:20
- 模拟和数字传感器和转换器2024/3/7 16:39:16

- 英特尔数据存储如何操作和实现
- 什么是微动开关_微动开关有什么用_微动开关使用方法
- VCC,VDD,VEE,VSS在电源原理图中有什么区别?
- 低压配电系统设计规范_低压配电系统设计注意事项
- xEV 主逆变器电源模块中第四代 SiC MOSFET 的短路测试
- 光耦详细应用教程
- 定义绝缘耐久性评估的电压脉冲测试要求
- 采用沟槽MOS结构,使存在权衡关系的VF和IR相比以往产品得到显著改善 ROHM推出实现业界超快trr的100V耐压SBD“YQ系列”
- NOVOSENSE - 纳芯微推出车规级温湿度传感器NSHT30-Q1,助力汽车智能化发展
- Keysight - EV 电池设计创新:扩大续航里程、延长电池寿命


