





基于ATMEGA48的仪表步进电机的细分控制系统设计
出处:yamoon 发布于:2011-08-26 14:15:29
仪表步进电机
步进电机是将电脉冲信号转变为角位移或线位移的开环控制元步进电机件。在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度,称为“步距角”,它的旋转是以固定的角度一步一步运行的。可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
仪表步进电机属于步进电机中体积、功耗较小的类别,可以由单片机或专用芯片的引脚直接驱动,不需外接驱动器,因而在仪表中被用于指针的旋转控制。
需求分析
本方案中使用的仪表具有如下特点和设计参数:
●指针响应灵敏、走位准确,即收到驱动脉冲后不能丢步;
●指针转动平稳,即指针从当前位置到目标位置之间的走位要平稳,正、反转都不能出现抖动;
●两相、步距角10o、转动范围300o。
根据技术参数可知,采用两相四拍和两相八拍时的步距角为10o和5o,在300o的范围内只能作30和60个刻度划分,在实际应用中,会发现指针步距角不能满足要求而且抖动不可避免。为了实现指针高的准确走位和平稳运转,要对步进电机步距进行高分辨率细分,这也是设计的难点所在。
步进电机的步距θ由于受制作工艺的限制齿数不能做得很多,因此步进电机的步距角就不可能很小, 而带来步进时存在明显的脉振不能精密移位的问题。细分驱动电路在70 年代中期由美国学者首次提出, 它是建立在步进电机的各相绕组理想对称和距角特性严格正旋的基础上的。它通过控制电动机各相绕组中电流的大小和比例, 使步距角减小到原来的几分之一至几十分之一, 细分驱动能极大地改善步进电机运行的平稳性, 近几年来由于微处理机技术的发展, 细分技术得到了广泛应用。
细分原理
两相四拍A、B、/A、/B的驱动状态表如表1所示。
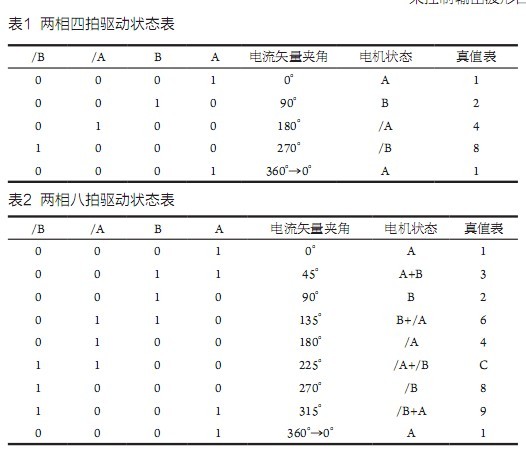
两相八拍A、B、/A、/B的驱动状态表如表2所示。
从以上的分析可知,两相四拍是整步运转不细分,两相八拍其实是2细分。合成的磁场和电流矢量夹角以90o和45o的方式变化,如此往复循环。
参考相关资料后不难发现:细分驱动技术常用近似正弦波的阶梯型电流代替矩形波电流,产生一个微步旋转磁场,从而带动电机以更小的步距角转动,其电流波形和旋转磁场矢量如图1所示。同时由于正弦波电流变化平滑,使电机运行更平稳、噪声更小。即通过改变相邻两相(A,B)电流的大小和方向(A相正弦波和B相余弦波矢量叠加),以改变合成磁场的夹角,通过电流矢量合成的方式来控制步进电机运转。


硬件设计和软件编程
根据细分原理可知,对于两相步进电机,需要同时控制两组线圈的电压大小和方向才能达到合成电流矢量控制的目的,控制线圈的电流大小有两种方案:其一是通过单片机写入数字量,由数模转换器件输出模拟电压,控制线圈电流大小;其二是通过某些单片机自带的PWM引脚输出占空比可控的方波,用其交流有效值控制线圈电流大小。很显然,按照正弦规律变化的占空比决定了线圈电流大小也按照相同的正弦规律变化。线圈的电压施加方向可以通过逻辑门电路来实现。
综上,选用具有两路16位PWM功能的ATMEGA48单片机,外围硬件电路设计如图2。
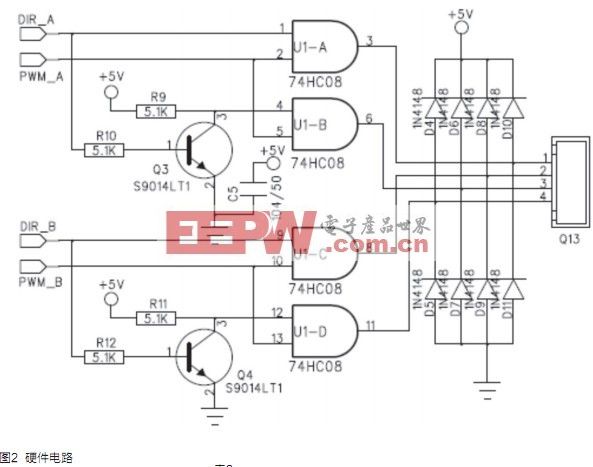
使用该单片机具有PWM功能的PB1和PB2连接PWM_A和PWM_B,使用两个普通引脚连接DIR_A和DIR_B即可实现对电机的控制。原理说明如下:电机的A、/A、B、/B分别对应四输入与门电路的3、6、8、11引脚。在DIR_A和DIR_B为低电平时,门电路的1、9引脚为0状态,三极管Q3、Q4截止,门电路的4、12引脚由于上拉处于1状态,这样,与门电路的3、8输出为0,即A、B为0;此时与门电路的6、11输出与PWM_A和PWM_B保持一致,即/A、/B由PWM_A和PWM_B决定。在其他状态下,也具有同类特点:A和/A之间、B和/B之间的通电极性由DIR_A和DIR_B决定;A和/A之间、B和/B之间的电流大小由PWM_A和PWM_B的占空比决定。而且只要三极管Q3、Q4工作正常,与门电路就不会出现逻辑混乱的情况。
配合硬件的设计,软件上编写了一个由64个数据组成的数组,分别对应了0~90o正弦波幅度变化的8位数字量化值(以阶梯波的方式模拟了64点正弦波抽样),每个值用来控制输出波形占空比,实际上参与了电流矢量夹角转动90o过程中其电流大小的计算。众所周知,正弦、余弦波相位相差90o,在已知0~90o正弦波幅度变化表后,同样可以得出90o~180o、180o~270o、270o~360o(0o)的正弦波、余弦波幅度变化表,所以通过0~90o正弦波幅度变化的8位数字量化表的演化,就可以在两相八拍(二细分)的基础上把电流矢量夹角分成四个象限,配合极性的控制,在每个象限中把A或/A的正弦波和B或/B的余弦波作8种组合,在每种组合中完成电流大小的变化,终作到两相64拍(16细分)的控制。而且,巧妙的一点就在于:通过选择64个数据对应每90o范围的正弦波的64个点,就可以用一个字节的大小来作为区分4个象限的标志,便于对正、余弦的角度进行演化,即0~63对应0~90o,64~127对应90o~180o,128~191对应180o~270o,192~255对应270o~360o。

两相64拍A、B、/A、/B的驱动状态表如表3(以B为起始状态)。
由于仪表指针从当前角指向目标角时,变化量会有不同。为保证指针响应灵敏、无抖动,必须在正、反转时考虑加、减速控制。程序中,可以根据变化量的大小和正负设定几个控制区间,分别写入不同的延时参数,根据此延时参数来控制电流大小、方向(改变PWM_A和PWM_B、DIR_A和DIR_B)变化时间,就达到了加、减速的控制的目的。
结语
本文介绍了步进电机的特点和硬件电路片工作原理。使用细分方式可以提高步进电机的控制,降低步进电机的振动和噪声。因此,在低频工作时,可以选用多种模式,以降低系统的振动和噪声。当系统需要在高速工作时,细分模式就有可能达不到要求的速度,这时可以选用整步或半步方式。在速度较高时,在整步或半步工作模式下,步进电机运行稳定,振动小,噪声也小。在细分、半步、整步几种工作模式之间的切换是相当容易的。使用该设计控制步进电机具有价格低、控制简单、工作可靠的特点,所以具有很高的推广价值和广阔的应用前景。
通过双PWM方式控制两相步进电机,既达到了高细分的目的,又在硬件成本上得到了优化。在现有电路的后级增加功率驱动电路并作程序的少量修改,就可以做成高、多细分步进电机驱动器。
参考文献:
[1]. ATMEGA48 datasheet https://www.dzsc.com/datasheet/ATMEGA48_144556.html.
[2]. PB1 datasheet https://www.dzsc.com/datasheet/PB1_1148989.html.
[3]. PB2 datasheet https://www.dzsc.com/datasheet/PB2_1202177.html.
版权与免责声明
凡本网注明“出处:维库电子市场网”的所有作品,版权均属于维库电子市场网,转载请必须注明维库电子市场网,https://www.dzsc.com,违反者本网将追究相关法律责任。
本网转载并注明自其它出处的作品,目的在于传递更多信息,并不代表本网赞同其观点或证实其内容的真实性,不承担此类作品侵权行为的直接责任及连带责任。其他媒体、网站或个人从本网转载时,必须保留本网注明的作品出处,并自负版权等法律责任。
如涉及作品内容、版权等问题,请在作品发表之日起一周内与本网联系,否则视为放弃相关权利。
- 数字电源控制与传统模拟控制的深度对比2026/2/2 11:06:56
- 模拟信号调理电路技术设计与选型运维指南2025/12/30 10:08:16
- 运算放大器压摆率的核心要点2025/9/5 16:27:55
- 深度剖析放大器稳定系数 K 与 Mu 的差异2025/9/2 16:44:05
- 什么是运算放大器失调电流2025/9/1 17:01:22



