





嵌入式DSP运动控制器的开发
出处:陈雪姝,林晓春 西安电子科技大学 发布于:2011-09-02 11:49:31
运动控制器就是控制电动机的运行方式:比如电动机在由行程开关控制交流接触器而实现电动机拖动物体向上运行达到指定位置后又向下运行,或者用时间继电器控制电动机正反转或转一会停一会再转一会再停。运动控制(MC)是自动化的一个分支,它使用通称为伺服机构的一些设备如液压泵,线性执行机或者是电机来控制机器的位置和/或速度。运动控制在机器人和数控机床的领域内的应用要比在专用机器中的应用更复杂,因为后者运动形式更简单,通常被称为通用运动控制(GMC)。运动控制被广泛应用在包装、印刷、纺织和装配工业中。
1 系统的构成与工作原理
1.1 系统的构成
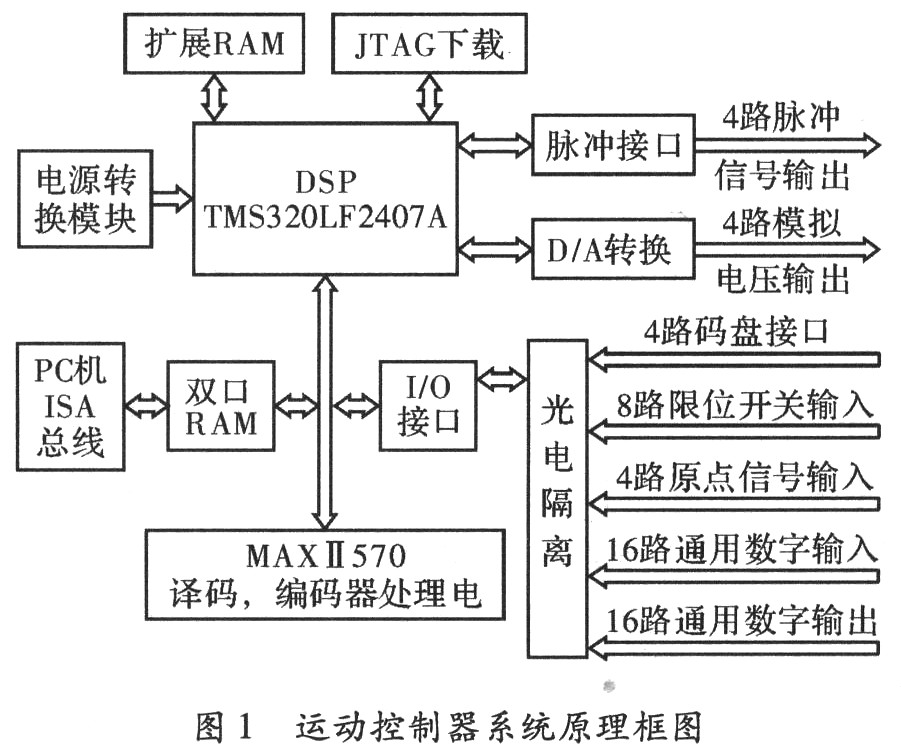
系统构成如图1所示,包括电源转换模块、DSP外围电路、脉冲输出电路、编码器信号采集和处理电路、D/A输出电路和DSP-PC机通信电路等。微处理器采用美国TI公司的16位定点DSP芯片TMS320LF2407A。一个运动控制器用以生成轨迹点(期望输出)和闭合位置的反馈环。许多控制器也可以在内部闭合一个速度环。 一个驱动或放大器用以将来自运动控制器的控制信号(通常是速度或扭矩信号)转换为更高功率的电流或电压信号。更为先进的智能化驱动可以自身闭合位置环和速度环,以获得更的控制。 一个执行器如液压泵、气缸、线性执行机或电机用以输出运动。 一个反馈传感器如光电编码器,旋转变压器或霍尔效应设备等用以反馈执行器的位置到位置控制器,以实现和位置控制环的闭合。 众多机械部件用以将执行器的运动形式转换为期望的运动形式,它包括齿轮箱、轴、滚珠丝杠、齿形带、联轴器以及线性和旋转轴承。 通常,一个运动控制系统的功能包括:速度控制 点位控制(点到点)。有很多方法可以计算出一个运动轨迹,它们通常基于一个运动的速度曲线如三角速度曲线,梯形速度曲线或者S型速度曲线。 电子齿轮(或电子凸轮)。也就是从动轴的位置在机械上跟随一个主动轴的位置变化。一个简单的例子是,一个系统包含两个转盘,它们按照一个给定的相对角度关系转动。电子凸轮较之电子齿轮更复杂一些,它使得主动轴和从动轴之间的随动关系曲线是一个函数。这个曲线可以是非线性的,但必须是一个函数关系。
1.2 系统的工作原理
本系统由上位机通过双端口RAM把运动控制指令或控制参数传递给运动控制器的DSP,DSP根据采集到的PC机指令,通过位置控制和速度控制算法进行计算。然后将计算出的脉冲信号经脉冲驱动送电机驱动。
2 系统的硬件电路描述
系统硬件电路主要包括电源转换模块、DSP及外围电路、扩展存储器电路、脉冲输出电路、编码器信号采集和处理电路、D/A输出电路和DSP-PC机通信电路等。控制器板卡使用Altera公司的可编程逻辑器件MAXⅡEPM570实现数字逻辑电路设计,降低了板卡的设计尺寸,增加了板卡的可靠性和设计灵活性,它的在线编程特性可使得数字逻辑设计、硬件设计,如同软件设计一样简便。
2.1 电源转换模块
TMS320LF240A是低功耗芯片,采用3.3 V供电,本设计采用Bay Linear Inc公司生产的电源转换芯片B1117提供。
2.2 DSP接口电路
2.2.1 时钟信号
选择16MHz的有源晶振作为外部时钟信号源,从DSP的XTAL1/CLXIN脚输入,经PLL1和PLL2倍频成32 MHz信号,供DSP使用。因而TMS320LF2407A的速度可达到3 1 ns,管脚XTAL2悬空。同时,16 MHz的有源晶振也是CPLD器件MAXⅡ570的外部时钟信号源。
2.2.2 串行EEPROM接口电路
TMS320LF2407A引导ROM为用户提供两种选择:同步传输通过串行外设接口(SPI)实现;异步传输通过串行通信接口(SCI)来实现。程序代码可以加载到用户指定的位置。为了有效的引导ROM和加载,本设计将MP/MC#引脚拉低,从而使DSP工作于微控制器模式。
2.2.3 扩展RAM电路
TMS320LF2407A有1.5 kB的数据/程序RAM,544 bit双口RAM(DARAM)和2 kB的单口RAM(SARAM),但是考虑到所需的程序存储空间和数据存储空间较大,在DSP外部用一片CY62136V作为外存储器,该芯片是128 kB×16 bit的存储器,其中64 kB作为数据存储器,其余64 kB作为程序存储器空间。
2.2.4 外部I/O信号处理
通过管脚引入的硬件中断,包括轴限位中断和编码器INDEX信号中断。8个限位中断信号通过光耦隔离后接入CPLD,经CPLD相与后接入DSP中断管脚XINT1,同时这些信号与DSP的I/O口相连。当某一轴运动到限位开关处时,就会触发DSP的外部中断信号XINT1,然后DSP就可以判定哪个限位开关已经到位。光耦器件选用Toshiba公司的贴片光耦TLP121,它的平均输入驱动电流为50 mA,平均输出驱动电流为5 mA,可直接驱动TTL电路。
2.3 脉冲输出电路
每一轴的两个信号输出口PLUSE+和PLUSE-可用来输出脉冲和方向信号,这两个输出口可以由程序设定为CW/CCW双脉冲模式或脉冲方向输出模式,用户可以设定J4~J11跳线来设定脉冲为差分输出或者单端输出两种方式。
2.4 D/A转换输出电路
数模转换电路的芯片采用BB公司生产的12位4路电压输出的数模转换芯片DAC7625。DAC的片选信号由DSP的DS,PS,IS,STRB,R/W#,WE#,A0,A1,A2,A3,A11经过译码得到。DAC的4个通道在DSP中的I/O地址为:0000 H,0001 H,0002 H,0003 H,DAC传送寄存器地址为0004 H。
2.5 编码器电路
该编码器信号处理电路是针对增量式脉冲编码器产生的信号进行处理。为消除外部驱动器大电源的干扰,3对信号经过光耦进行隔离。利用DSP事件管理器中的正交编码脉冲(QEP)电路,对引脚上的脉冲数目和频率分别解码和计数
2.6 DSP-PC机通信电路
基于嵌入式系统的运动控制器非常重要的功能之一就是要实现网络信息传递。因此需要s用网络接口芯片来实现网络之间通信。在本系统中采用了REALTEK公司的RTL8019AS网络接口芯片。RTL8019AS 引脚可分为电源及时钟引脚、网络介质接口引脚、自举ROM及初始化EEPROM接口引脚、主处理器接口引脚、输出指示及工作方式配置引脚。由此将网卡硬件接口电路设计主要分为两大部分:部分为网卡与DSP接口实现,第二部分为网卡芯片外围电路设计。RTL8019AS的总线接口是与ISA总线兼容的,虽然不能与5402的外部总线直接接口,但是只要进行一些简单的逻辑变换就可以了。另外,5402和RTL8019AS的引脚电平不兼容,因此它们之间对应的引脚不能够直接相连,需要在中间加上电平转换芯片,系统中的CPLD可以完成电平转换功能,通过CPLD还能够产生RTL8019AS的控制逻辑信号。
3 软件程序设计及流程
整个运动控制系统程序主要包括EEPROM引导程序和DSP主程序两部分。其中,Flash引导程序的作用是把系统程序从片外低速EEPROM传送到片外高速RAM中运行,在运动控制卡的硬件调试阶段,程序规模比较小,程序可以存放在片内的。Flash中,这样则不需要引导程序,直接在片内运行程序。系统程序主要由主程序、读写双口RAM程序、脉冲输出程序、插补程序和加减速控制程序组成。主程序调用各子程序,进行与上位机的通信、I/O、QEP、定时器及中间寄存器的初始化、设置中断标志、读取计数器的值、计算各控制量、积分平滑等功能。当发生中断时,调用相应中断程序,并修改或重置标志位。
图2所示为DSP主程序的流程图。主CPU使用硬件复位控制DSP的复位操作,DSP复位后运行片内ROM或加载到RAM中的系统主程序。DSP主程序由初始化程序、时钟循环等待中断程序组成。初始化程序完成所有变量的初始化,复位全部外设和关闭所有输出。之后进入循环和等待中断的过程,检测到主机命令之后,读取命令并根据系统需要调用相应的处理程序。命令处理完后再进入循环等待状态,命令处理程序是实现运动控制器功能的关键程序,包括运动控制的算法,速度控制、位置控制等功能的实现,还包括完成数据写入和读取等功能,同时对外部中断进行处理。当上位机给运动控制卡发送控制命令时,DSP首先读取主机发送来的轴的目标位置,根据速度控制的模式设定指令选择相应的速度控制算法,同时查询外部事件,如有事件发生,执行相应的处理程序。接着就可以送出轴的控制输出,检测各轴是否都完成运动(判断轴状态寄存器完成标志位),完成则推出命令处理程序,否则继续执行。

4 结束语
运动控制器的硬件设计需要注意:如抗干扰、外围电路的速度与DSP的实时性能匹配问题。这些问题相互影响,要确定一个正确的电路结构和合理的PCB布线,需要大量的实际经验,因此在电路结构方面仍有待改进,使之更适应稳定、高速的控制要求。对控制软件的改进主要包括以下两方面:
(1)完成上位机上接口函数、运动控制函数库和上层调试环境的设计、编写NURBS数学处理程序,在运动控制器内部实现不同的插补算法,建立运动控制器的操作平台和完善的人机交互功能,使得运动控制器具有更强大的控制性能和更容易编程;
(2)对伺服电机的控制只提供了硬件上的支持,在软件上需要对光电编码器的反馈信号进行分析,计算出与给定位置的误差,再通过软件PID算法调节器获得位置控制量来控制伺服系统。
上一篇:ARM在脉象仪系统中的应用
版权与免责声明
凡本网注明“出处:维库电子市场网”的所有作品,版权均属于维库电子市场网,转载请必须注明维库电子市场网,https://www.dzsc.com,违反者本网将追究相关法律责任。
本网转载并注明自其它出处的作品,目的在于传递更多信息,并不代表本网赞同其观点或证实其内容的真实性,不承担此类作品侵权行为的直接责任及连带责任。其他媒体、网站或个人从本网转载时,必须保留本网注明的作品出处,并自负版权等法律责任。
如涉及作品内容、版权等问题,请在作品发表之日起一周内与本网联系,否则视为放弃相关权利。
- EPS Global - 谁需要嵌入式安全?2024/4/22 15:39:31
- 什么是嵌入式SoC2024/4/3 16:20:28
- EasyARM-i.MX283(7)A 默认供电方案2024/3/28 17:39:53
- EasyARM-i.MX283(7)A 的快速入门2024/3/27 17:29:30
- 非线性数字滤波器:用例和示例代码2024/3/14 16:34:20



