





AGV激光雷达SLAM定位导航技术
出处:机器人网 发布于:2018-06-06 15:07:02
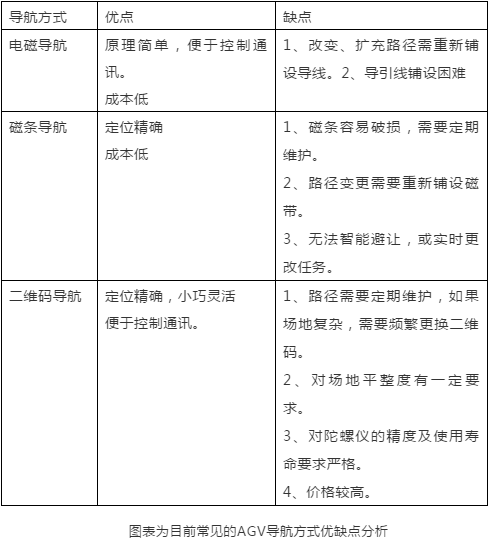
定位和导航一般是相辅相成,传统的定位导航方式(电磁导航、磁条导航)的优缺点如下方图表所示,这些方案的优点和局限性都很明显。稍微灵活点的导航定位方案运用二维码、反光板等,人工预设一些特征来定位,比较典型的例子是Amazon的Kiva。

Amazon的Kiva
【
■SLAM(同步定位与地图构建)算法在AGV小车中的使用
目前,AGV厂家运用的的导航方式是激光雷达+SLAM的定位导航技术。
SLAM表示在不具备周围环境信息的前提下,让移动机器人在运动过程中根据自身携带的传感器和对周围环境的感知进行自身定位,同时增量式构建周围环境地图。SLAM可以提高移动机器人自主能力和环境适应能力,实现在未知环境中进行自主定位和导航。SLAM运用在AGV物流小车上,可以不用预先铺设任何轨道,方便工厂生产线的升级改造和导航路线的变更,实时避障,环境适应能力强,更好地实现多AGV小车的协调控制。
■激光雷达在AGV小车中的使用
SLAM中可以进行环境信息感知的主要传感器有激光雷达、摄像头等。其中,基于激光雷达的AGV小车自主定位与建图的方法,由于其测量高探测距离远,且不易受外界环境的干扰,是适合AGV小车SLAM定位和建图的传感器。
N301导航型激光雷达
镭神智能的激光雷达探测距离远,远可达200米,测量高,可以很好的被用于地图构建,在AGV小车的自主定位与导航中应用十分广泛。
WXX0XAGV防撞激光雷达
WXX0X是一系列用于室内设备防撞及智能区域检测的产品,此系列产品非常适用于AGV、RGV、机器人等。此系列产品可以通过4个开关量输入信号组合选取15组区域组(FieldSet)中的任一个作为当前工作区域组,适应复杂多变的应用环境,还可以输出点云数据。

■镭神激光雷达+SLAM算法可实现的五大功能
<1>激光雷达为主传感器的SLAM地图构建
激光雷达可以在探测范围内进行360°二维或三维扫描,产生数据信息。SLAM可根据激光雷达提供的数据信息构建周边环境地图并计算自身所在的位置。激光雷达比其他传感器的优势在于能更高的测出障碍点的角度和距离,方便定位导航和地图构建。
<2>依据地图和场景应用模式下的路径规划学习
AGV小车在已建好的地图中行驶,边行驶边记忆,学习新的路径,存储已学习的路径,在相同场景下,智能选出路径完成工作任务。
<3>根据既定学习路径及工作模式命令进行自由路线巡航
根据需要完成的工作,自由切换路径。
<4>利用防撞激光雷达实现运动过程中的智能多级避障保护
在自由路线巡航过程中,激光雷达会持续对周围环境进行扫描。当发现动态的物体或未知障碍时,局部规划器根据这些扫描到的局部信息,确定短期内的运动。当避障行为的优先级高于沿原路径前进时,局部规划器就能够通过竞争获得执行系统的控制权,使得AGV按照局部规划结果运动。完成对当前障碍物的躲避行为后,全局规划器再次取得执行系统的控制权,使得AGV重新回到全局规划路径上,继续按着已学习的路径运动。可根据需要设置预警区,减速区与停止行驶区,达到智能多级避障的目的。
<5>驱动轮和AGV车体不同轴下保持稳定运动控制技术
由于底盘运动与AGV车身位姿非同步,故需要在底盘与车身连接轴外加编码器,以用来同步两者运动调节。
版权与免责声明
凡本网注明“出处:维库电子市场网”的所有作品,版权均属于维库电子市场网,转载请必须注明维库电子市场网,https://www.dzsc.com,违反者本网将追究相关法律责任。
本网转载并注明自其它出处的作品,目的在于传递更多信息,并不代表本网赞同其观点或证实其内容的真实性,不承担此类作品侵权行为的直接责任及连带责任。其他媒体、网站或个人从本网转载时,必须保留本网注明的作品出处,并自负版权等法律责任。
如涉及作品内容、版权等问题,请在作品发表之日起一周内与本网联系,否则视为放弃相关权利。
- 运动传感器简介:PIR、倾斜、力等2024/11/15 16:40:23
- 声音传感器的简单输入/输出系统2024/11/8 16:52:46
- DHT11传感器简介及数据传输过程2024/3/20 17:23:57
- 什么是DS18B20温度传感器,DS18B20温度传感器的优缺点2024/2/26 17:15:41
- 使用细铜线作为集成传感器和加热器进行温度控制2024/2/18 16:11:54



