





传感器性能如何实现基于状态的监控解决方案
出处:厂商供稿 发布于:2022-07-05 15:23:57
为了启用这些新功能并获得基于状态的监控的好处,新的解决方案必须准确、可靠和稳健,以便实时监控可以扩展到对潜在设备故障的基本检测之外,以提供有洞察力和可操作的信息。下一代技术的性能与系统级洞察力相结合,可以更深入地了解解决这些挑战所需的应用程序和要求。
振动是机器诊断的关键组成部分之一,已被可靠地用于监控各种工业应用中关键的设备。存在大量文献来支持启用振动监测解决方案所需的各种诊断和预测能力。较少涉及的是振动传感器性能参数(例如带宽和噪声密度)与终端应用故障诊断能力之间的关系。本文介绍了工业自动化应用中的主要机器故障类型,并确定了与特定故障相关的关键振动传感器性能参数。
下面重点介绍几种常见故障类型及其特征,以深入了解开发基于状态的监控解决方案时必须考虑的一些关键系统要求。这些包括但不限于不平衡、不对中、齿轮故障和滚动轴承缺陷。
不平衡
什么是不平衡,是什么原因造成的?
不平衡是质量分布不均,导致负载将质心从旋转中心移开。系统不平衡可归因于不正确的安装,例如联轴器偏心、系统设计错误、组件故障,甚至碎片或其他污染物的堆积。例如,大多数感应电动机中内置的冷却风扇可能会由于灰尘和油脂的不均匀堆积或风扇叶片损坏而变得不平衡。
为什么不平衡系统是一个问题?
不平衡的系统会产生过度的振动,这些振动会机械地耦合到系统内的其他组件,例如轴承、联轴器和负载——可能会加速处于良好运行状态的组件的劣化。
如何检测和诊断不平衡
整个系统振动的增加可能指向由不平衡系统造成的潜在故障,但通过频域分析来诊断振动增加的根本原因。不平衡系统以系统的旋转速率(通常称为 1×)产生一个信号,其幅度与旋转速率的平方成正比,F = m × w2。1× 分量通常始终存在于频域中,因此通过测量 1× 和谐波的幅度来识别不平衡系统。如果 1× 的幅度高于基线测量值且谐波远小于 1×,则可能是不平衡系统。水平和垂直相移振动分量也可能出现在不平衡系统中。 1
诊断不平衡系统时必须考虑哪些系统规格?
需要低噪声来减少传感器影响并能够检测由不平衡系统产生的小信号。这对于传感器、信号调理和采集平台很重要。
检测这些小的不平衡需要采集系统有足够的分辨率来提取信号(尤其是基线信号)。
带宽对于捕获除了旋转速率之外的足够信息以提高诊断的准确性和信心是必要的。1× 谐波会受到其他系统故障的影响,例如未对准或机械松动,因此分析转速或 1× 频率的谐波有助于区分系统噪声和其他潜在故障。1 对于转速较慢的机器,基本旋转速率可以远低于 10 rpm,这意味着传感器的低频响应对于捕获基本旋转速率至关重要。Analog Devices 的 MEMS 传感器技术能够检测低至直流的信号,并能够测量旋转速度较慢的设备,同时还能够测量通常与轴承和齿轮箱缺陷相关的较高频率成分的宽带宽。
为什么错位是一个问题?
错位误差会迫使组件在比组件初设计处理的压力或负载更高的压力或负载下运行,从而影响更大的系统,并终导致过早失效。
如何检测和诊断错位
错位误差通常显示为系统转速的二次谐波,称为 2×。2x 分量并不总是出现在频率响应中,但当它出现时,可以使用幅度与 1x 的关系来确定是否存在未对准。根据错位的类型、测量位置和方向信息,错位增加可激发高达 10 倍的谐波。1 图 4 突出显示了与潜在错位故障相关的特征。
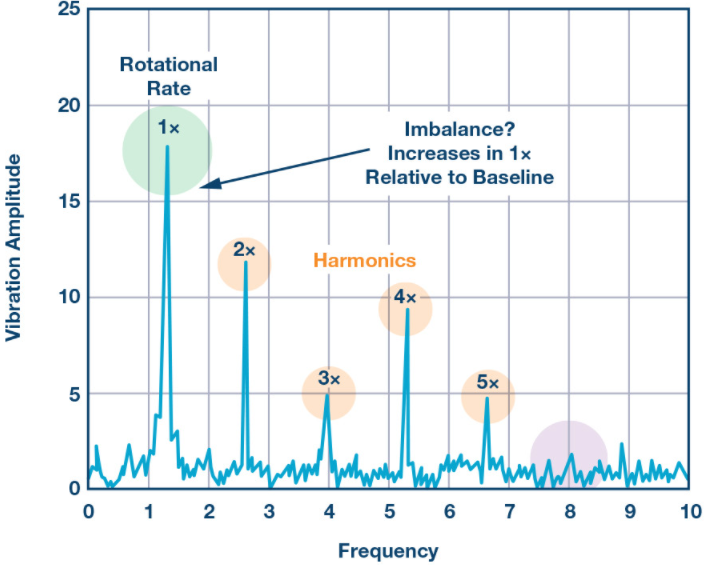
图 1. 基于旋转速率或 1 倍频率的振幅增加,存在不平衡系统的可能性。
错位
什么是错位,是什么原因造成的?
顾名思义,系统错位发生在两个旋转轴未对齐时。图 2 显示了一个理想的系统,从电机开始对齐,然后是轴、联轴器,一直到负载(在本例中是泵)。

图 2. 一个理想对齐的系统。
错位可能发生在平行方向和角度方向,也可能是两者的组合(见图 3)。当两个轴在水平或垂直方向上发生位移时,就会发生平行错位。当其中一个轴与另一个轴成一定角度时,就会发生角度不对中。 2
 图 3. 不同未对准的示例包括 (a) 角度、(b) 平行或两者的组合。
图 3. 不同未对准的示例包括 (a) 角度、(b) 平行或两者的组合。
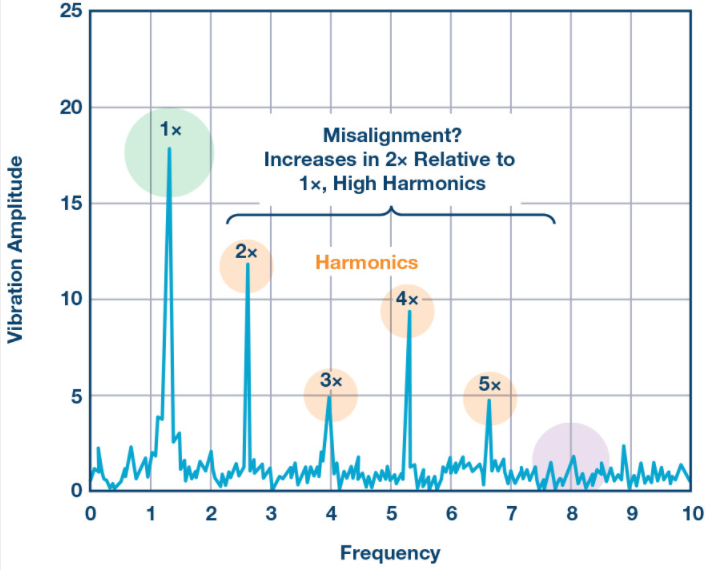
图 4. 增加的 2 倍谐波与增加的高次谐波相结合,表明存在潜在的失准。
诊断失准系统时必须考虑哪些系统规格?
需要低噪声和足够的分辨率来检测小的错位。机器类型、系统和工艺要求以及转速决定了允许的不对中公差。
带宽对于捕获足够的频率范围和提高诊断的准确性和信心是必要的。1×谐波可能会受到其他系统故障的影响,例如未对准,因此分析1×频率的谐波有助于区分其他系统故障。对于更高转速的机器尤其如此。例如,运行在 10,000 rpm 以上的机器(例如机床)通常需要超过 2 kHz 的质量信息,以便以高可信度准确检测不平衡。
多向信息还提高了诊断的准确性,并提供了对错位误差类型和错位方向的洞察。
系统的相位与定向振动信息相结合,进一步改进了对错位错误的诊断。测量机器上不同点的振动并确定相位测量值或整个系统的差异,可以深入了解错位是角度错位、平行错位还是两种错位类型的组合。 1
滚动体轴承缺陷
什么是滚动体轴承缺陷,是什么原因造成的?
滚动元件轴承缺陷通常是机械引起的应力或润滑问题的伪影,它们会在轴承的机械部件内产生小裂缝或缺陷,从而导致振动增加。
为什么滚动元件轴承故障是一个问题?滚动轴承几乎存在于所有类型的旋转机械中,从大型涡轮机到慢速旋转电机,从相对简单的泵和风扇到高速 CNC 主轴。轴承缺陷可能是润滑污染(图 5)、安装不当、高频放电电流(图 5)或系统负载增加的迹象。故障可能导致灾难性的系统损坏,并对其他系统组件产生重大影响。
如何检测和诊断滚动轴承故障?
有许多技术可用于诊断轴承故障,并且由于轴承设计背后的物理特性,可以根据轴承几何形状、旋转速度和缺陷类型计算每个轴承的缺陷频率,这有助于诊断故障。轴承缺陷频率在图 6 中列出。

图 6. 轴承缺陷频率取决于轴承类型、几何形状和转速。
对来自特定机器或系统的振动数据的分析通常依赖于时域和频域分析的结合。时域分析可用于检测系统振动水平整体增加的趋势。但是,此分析中包含的诊断信息很少。频域分析提高了诊断洞察力,但由于其他系统振动的影响,识别故障频率可能很复杂。
对于轴承缺陷的早期诊断,缺陷频率的谐波用于识别早期或初期故障,以便在发生灾难性故障之前对其进行监控和维护。为了检测、诊断和理解轴承故障的系统影响,图 7 所示的包络检测技术与频域中的频谱分析相结合,通常可以提供更深入的信息。
poYBAGLDpFSAQt4MAAIr6kA29Xc046.png
图 7. 包络检测等技术可以从宽带宽振动数据中提取早期轴承缺陷特征。
诊断滚动轴承故障时必须考虑哪些系统规范?
低噪声和足够的分辨率对于检测早期轴承缺陷至关重要。通常,这些缺陷特征在缺陷开始期间的幅度较低。由于设计公差,轴承固有的机械滑移通过在轴承的频率响应中跨多个区间传播幅度信息,进一步降低了振动幅度,因此需要低噪声来更早地检测信号。 2
带宽对于轴承缺陷的早期检测至关重要。在旋转过程中每次撞击缺陷时都会产生一个包含高频成分的脉冲(参见图 7)。监测轴承缺陷频率的谐波,而不是转速的谐波,以发现这些早期故障。由于轴承缺陷频率与转速之间的关系,这些早期特征可能出现在几千赫兹范围内,并远远超出 10 kHz 至 20 kHz 的范围。2 即使对于低速设备,轴承缺陷的固有性质也需要更广泛的用于早期检测的带宽,以避免系统谐振和影响较低频带的系统噪声的影响。 3
动态范围对于轴承缺陷监测也很重要,因为系统负载和缺陷会影响系统所经历的振动。增加的载荷会导致作用在轴承和缺陷上的力增加。轴承缺陷还会产生激发结构共振的脉冲,放大系统和传感器所经历的振动。2 随着机器在停止/启动条件或正常运行期间加速和减速,不断变化的速度为系统共振成为潜在的机会4 传感器饱和会导致信息丢失、误诊,并且在某些技术的情况下会损坏传感器元件。
齿轮缺陷
什么是齿轮缺陷,是什么原因造成的?
由于疲劳、剥落或点蚀,齿轮故障通常发生在齿轮机构的齿中。这些可以表现为齿轮根部的裂纹或齿面金属的脱落。它们可能由磨损、负载过大、润滑不良、间隙以及偶尔不正确的安装或制造缺陷引起。 5
为什么齿轮故障是一个问题?
齿轮是许多工业应用中动力传输的主要元件,并且承受着巨大的应力和负载。它们的健康对于整个机械系统的正常运行至关重要。可再生能源领域的一个众所周知的例子是,导致风力涡轮机停机(以及随之而来的收入损失)的原因是主动力系统中的多级齿轮箱发生故障。5类似的考虑也适用于工业应用。
如何检测和诊断齿轮故障?
由于难以在故障附近安装振动传感器以及由于系统内的多个机械激励而存在显着的背景噪声,因此齿轮故障难以检测。在更复杂的齿轮箱系统中尤其如此,其中可能存在多个旋转频率、齿轮比和啮合频率。 6 因此,在检测齿轮故障时可以采用多种互补的方法,包括声发射分析、电流特征分析和石油碎屑分析。
在振动分析方面,齿轮箱外壳是加速度计的典型安装位置,主要振动模式是轴向方向。7 健康的齿轮会以称为齿轮啮合频率的频率产生振动特征。这等于轴频率和齿轮齿数的乘积。通常还存在一些与制造和组装公差相关的调制边带。这在图 8 中针对健康齿轮进行了说明。当出现诸如齿裂纹等局部故障时,每转中的振动信号将包括系统在相对较低的能量水平下对短时冲击的机械响应。这通常是一个低幅度的宽带信号,通常被认为是非周期性和非平稳的。 7,8
曲轴转速约为 1000 rpm,齿轮转速约为 290 rpm,齿轮齿数 = 24 的健康齿轮的频谱。
由于这些特殊特性,标准频域技术本身并不适合准确识别齿轮故障。频谱分析可能无法检测到早期齿轮故障,因为冲击能量包含在边带调制中,边带调制也可能包含来自其他齿轮对和机械部件的能量。时间同步平均等时域技术或小波分析和包络解调等混合域方法通常更合适。 9
诊断齿轮故障时必须考虑哪些系统规格?
宽带宽通常在齿轮故障检测中非常关键,因为齿轮齿数在频域中充当乘数。即使对于相对低速的系统,所需的检测频率范围也很快被推高到数 kHz 区域。此外,局部故障进一步扩展了带宽需求。
出于多种原因,分辨率和低噪声非常关键。将振动传感器安装在靠近特定故障区的困难意味着机械系统对振动信号的衰减可能更高,因此能够检测到低能量信号至关重要。此外,由于信号不是静态周期性信号,因此不能依赖从高本底噪声中提取低幅度信号的标准 FFT 技术——传感器本身的本底噪声必须很低。在齿轮箱环境中尤其如此,在齿轮箱环境中,齿轮箱的不同元件混合了多种振动特征。除了这些考虑因素之外,早期检测的重要性不仅是出于资产保护的原因,也是出于信号调理的原因。
概括
虽然很常见,但不平衡、不对中、滚动元件轴承缺陷和齿轮齿故障只是可以使用高性能振动传感器检测和诊断的众多故障类型中的一小部分。更高的传感器性能与适当的系统级考虑相结合,可实现下一代基于状态的监控解决方案,从而更深入地了解各种工业设备和应用的机械操作。这些解决方案将改变维护的执行方式和机器的运行方式,终减少停机时间、提高效率并为下一代设备提供新功能。
对低带宽被认为 《1 kHz,中等带宽在 1 kHz 到 5 kHz 之间,高带宽被认为 》5 kHz。低噪声密度被认为 》1 mg/√Hz,中等噪声密度在 100 μg/√Hz 到 1 mg/√Hz 之间,高噪声密度被认为 《100 μg/√Hz。低动态范围被认为 《5 g,中等动态范围在 5 g 到 20 g 之间,高动态范围被认为 》20 g。
上一篇:视频监控常见的系统故障
下一篇:智能报警系统设计实现
版权与免责声明
凡本网注明“出处:维库电子市场网”的所有作品,版权均属于维库电子市场网,转载请必须注明维库电子市场网,https://www.dzsc.com,违反者本网将追究相关法律责任。
本网转载并注明自其它出处的作品,目的在于传递更多信息,并不代表本网赞同其观点或证实其内容的真实性,不承担此类作品侵权行为的直接责任及连带责任。其他媒体、网站或个人从本网转载时,必须保留本网注明的作品出处,并自负版权等法律责任。
如涉及作品内容、版权等问题,请在作品发表之日起一周内与本网联系,否则视为放弃相关权利。
- 射频设计的四种关键浪涌保护方法2024/9/23 17:04:58
- 使用 SSCB 保护现代高压直流系统的优势2024/9/18 16:44:49
- WinCC概述_WinCC的功能和特点2024/8/20 17:43:29
- Power GreenPAK SLG5100x设备的保护特性2024/8/19 16:14:24
- 地下电缆的地击和雷电防护2024/8/13 16:33:05



