





什么是激光雷达以及如何使用它?
出处:维库电子市场网 发布于:2023-05-22 15:18:11
LiDAR 是使用光或不可见(例如,红外)电磁辐射来检测和测量到物体的距离的实践。LiDAR 代表光检测和测距。
您可能以前听说过 LiDAR,但对它的了解可能并不多。我在本文中的目标是在概念层面上解释 LiDAR 的工作原理。
激光雷达的应用
LiDAR 经常出现在纪录片和新闻文章中,因为它在许多科学领域发挥着重要作用。
LiDAR 用于从农业到气象学、生物学到机器人学、从执法到太阳能光伏部署的各个领域。您可能会在有关天文学和航天的中看到 LiDAR,或者您可能听说过它在采矿作业中的用途。
LiDAR 可以对小物件进行成像,例如用于考古学的历史遗迹或用于生物学的骨骼。另一方面,LiDAR 还可以对非常大的事物进行成像,例如农业和地质景观。
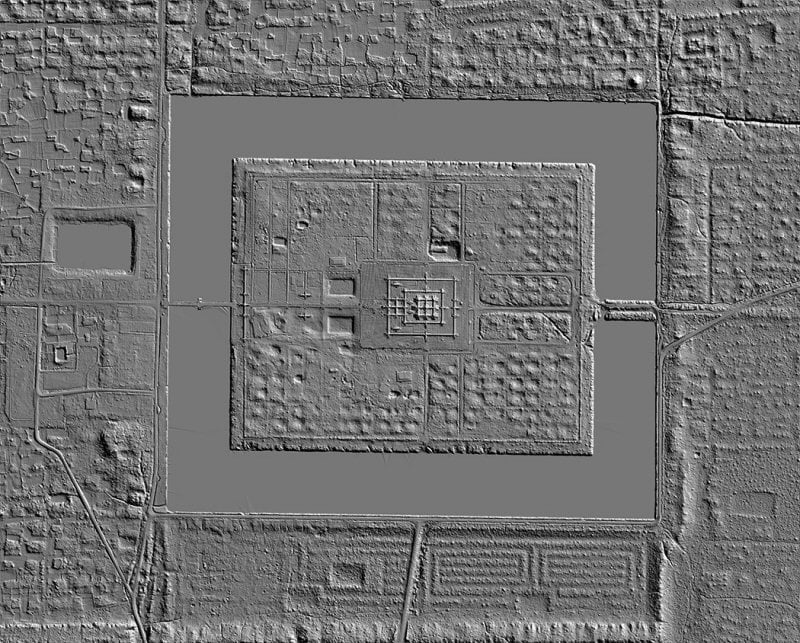
吴哥窟的航空激光雷达图像。图片由古代探险家提供 。
然后你就有了 LiDAR 系统,可以对移动的物体或可能正在移动的物体进行成像。这些非静态系统可能成为常见的 LiDAR 形式,因为它们用于军事系统、测量飞机和原型自动驾驶汽车的机器视觉。
然而,其他形式的 LiDAR 根本不用于对固体表面成像:NASA 在大气研究中使用 LiDAR,而其他 LiDAR 系统设计用于在水下运行和成像表面。
显然,这项技术非常灵活。
与 SONAR 和 RADAR 的相似之处
那么如果LiDAR是LIght Detection And Ranging,那是不是类似于SONAR(Sound Navigation And Ranging)和RADAR(RAdio Detection And Ranging)?是的,有点。要了解这三者有何相似之处,让我们先谈谈声纳(回声定位)和雷达的工作原理。
SONAR 发出已知频率的强大脉冲声波。然后,通过计算脉冲返回所需的时间,您可以测量距离。反复这样做可以帮助您对周围的环境有良好的感觉。
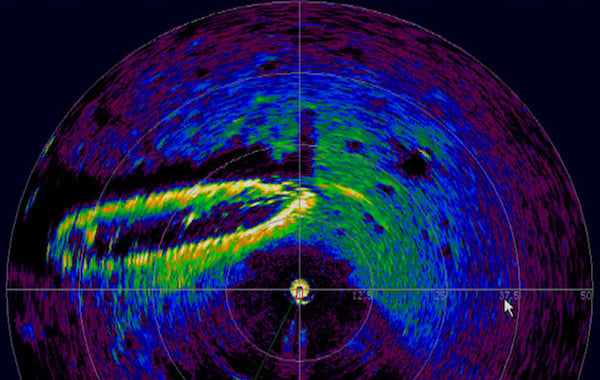
用于定位海上沉船的声纳成像。图片由 NOAA 探索与研究办公室提供。
SONAR 的关键要素是声波,但有许多不同类型的波。如果我们使用相同的原理并将波的类型从声波更改为电磁波(无线电),就会得到 RADAR(RAdio Detection And Ranging)。
有许多不同类型的雷达使用不同频率的 EM 频谱。光只是人眼可检测到的一个特殊波长范围,这是 LiDAR 与 RADAR 的区别之一。两者之间还有其他差异,但我将重点关注空间分辨率作为关键差异。
雷达使用大波前和长波长,分辨率很差。相比之下,LiDAR 使用激光(紧密波前)和更短的波长。波长直接决定了成像系统的分辨能力:较短的波长(对应于较高的频率)增加了分辨能力。

天气雷达成像捕捉天气系统和候鸟的移动。图片由NASA提供。
如果你的波前很大,你不得不想——你测量的距离是多少?
想象一下,在您的下一个家居装修项目中尝试使用手电筒测距仪。那个手电筒是测量到光束的距离还是它后面的墙?这太不而不实用。然而,激光测距仪要准确得多。
用像素测量
LiDAR 使用激光来测量距离,但这与激光测距仪没有任何不同——您将它指向某物并测量距离。但是如果那个距离测量被解释为单个像素呢?然后,您可以进行多次距离测量并将它们放置在网格中;结果将是一个传达深度的图像,类似于黑白照片,其中像素传达光强度。听起来很酷,而且很有用,对吧?
但是在我们完全理解这个系统是如何工作之前,我们还有几个问题需要回答。
我们需要多少像素?
如果我们将 LiDAR 与早期的数码相机进行比较,我们将需要一到两个百万像素(或一到两百万像素)。假设我们需要 200 万个激光器,然后我们需要测量每一个激光器指示的距离,因此需要另外 200 万个传感器,然后是电路来进行计算。
也许使用大量激光并不是的方法。如果我们不尝试拍摄完整的“照片”,而是像扫描仪那样操作,会怎样呢?即,我们是否可以拍摄部分图片,然后移动像素并再次拍摄图片?这听起来像是一种简单得多的设备,只需一个激光器和一个检测器即可实现。然而,这也意味着我们不能像用相机那样拍下即时的“照片”。
我们如何移动我们的像素?
在扫描仪中,物理像素沿着图像移动。但这在很多情况下并不实用,因此我们可能需要一种不同的方法。
使用 LiDAR,我们正在尝试拍摄“深度照片”,或者您可以说我们正在尝试拍摄“3D 模型”。
如果您在数学课上注意力集中,您可能会想起笛卡尔坐标系(X、Y、Z)和球坐标系(r、theta、phi)。我提出这个是因为,如果我们假设 LiDAR 位于球形系统的原点,那么我们只需要知道水平角 (theta)、垂直角 (phi) 和距离 (r) 来构建我们的3D模型。
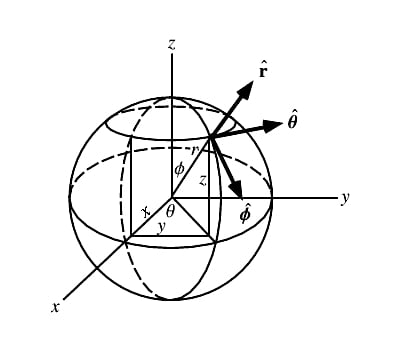
球坐标系的表示。图片由Wolfram MathWorld提供。
只有一个来源,3D 模型将是一个单一的表面。但是如果我们将多个表面映射到一起,就可以得到一个完整的 3D 模型。所以我们需要一个激光器和一个传感器来使用球坐标系制作我们的图像。
一些 LiDAR 系统是移动的,使用 GPS 或其他定位系统将所有读数一起映射到单个图像中。这些移动系统仍然使用相同的原理,但它们可能以不同的方式应用。
我们实际上如何快速改变激光的角度?
我们有两百万个“像素”要测量。我们怎么可能调整我们的激光来测量它们呢?
一天只有 86,400 秒,因此用任何超过千分之一秒的时间来测量和调整可能太长而不实用。
那么他们是如何快速调整像素的呢?关键是他们永远不会停止调整它,使用以非常和众所周知的速度旋转的旋转镜或棱镜。激光被反射镜或棱镜反射,因此其位置不断变化,但变化速度已知。这使得调整我们的角度之一(phi 或 theta)以扫描我们的图像变得非常快速和容易。为了扫描另一个角度,我们可以使用更慢的系统,例如精密步进电机。
但我们还有一个主要问题需要解决。
我们如何测量距离?
有多种使用激光测量距离的方法,具体取决于系统试图实现的目标。并且单个系统可能同时使用多种方法来提高准确性。所有方法都需要非常精密的设备。
容易理解的是飞行时间(ToF)。这也常被列为使用激光测量距离的方法。如果您计算光传播 2 毫米所需的时间,即 1 毫米分辨率所需的距离,您得到的时间为 6.67 皮秒。这需要一些非常的设备来测量,但可以付出一定的代价。
另一种方法是三角测量,它使用第二个旋转镜来重定向接收器信号;通过测量角度的变化,就可以得到距离。三角测量可能不适用于长距离,并且旋转镜的使用可能会使系统复杂化。
,通过调制激光,可以测量激光调制中的相移。由于调制的周期性特性,它本身不能用于测量距离。相反,它会生成一个可能的距离列表,除了另一种方法外,还可以使用这些距离来提高准确性。

一群人的 LiDAR 渲染图。图片由NASA提供。
LiDAR 激光器
要谈的一件事:激光器本身。尽管名称如此,但大多数 LiDAR 系统使用红外线而不是可见辐射。
由于电磁辐射与物质的相互作用受波长控制,因此某些波长更适合某些应用。有一天,微波 (maser) 或 x 射线 (xaser) 激光器可用于构建可透过多种材料成像的 LiDAR 系统,从而大大提高其实用性。
下一篇:传感器常用的3种检测方法
版权与免责声明
凡本网注明“出处:维库电子市场网”的所有作品,版权均属于维库电子市场网,转载请必须注明维库电子市场网,https://www.dzsc.com,违反者本网将追究相关法律责任。
本网转载并注明自其它出处的作品,目的在于传递更多信息,并不代表本网赞同其观点或证实其内容的真实性,不承担此类作品侵权行为的直接责任及连带责任。其他媒体、网站或个人从本网转载时,必须保留本网注明的作品出处,并自负版权等法律责任。
如涉及作品内容、版权等问题,请在作品发表之日起一周内与本网联系,否则视为放弃相关权利。
- 频谱仪精准 TOI 测量的设置优化2025/9/5 16:39:30
- SiPM 测试板偏置电压源的选择与考量2025/9/2 15:54:57
- EMC的测试方法有几种常见2025/8/28 17:25:45
- FCBAG封装集成电路在失效分析中常用的检测设备与技术2025/8/27 17:03:25
- 高端精密装备精度测量的核心理论与实用方法2025/8/27 16:31:27



