





使用 Z32F128 MCU 进行空间矢量调制
出处:维库电子市场网 发布于:2023-08-21 16:18:41
本应用笔记介绍了采用 Z32F128 微控制器的三相 BLDC 电机的空间矢量调制。它演示了微控制器如何实现 BLDC 电机高效、经济的矢量调制。
可以通过在六边形内创建旋转电压参考矢量来控制三相 BLDC 电机,该电压参考矢量的旋转速度决定电机旋转的频率。本应用笔记中讨论的空间矢量调制应用使用带有三个用于角度位置反馈的霍尔传感器的 BLDC 型电机。
讨论
电动机由定子和固定框架组成,其中旋转部件或转子安装在带有轴承的轴上。在三相 BLDC 电机中,定子配有三组电感器绕组,由三个交流电压输入供电,这些电压输入彼此相位偏移 120 度,以产生旋转磁通量场。该定子磁通场对转子的永磁体磁通场施加磁力,从而在输出轴上产生扭矩。
在三相电机控制应用中,电机的输入电压由三相逆变桥产生。该桥包含三个互补的源极/漏极晶体管对,它们将接地或总线电压 DC 连接到其三个输出中的每一个,以响应来自微控制器的数字控制信号。Z32F128 ARM MCU 在电桥控制信号上使用 PWM,在电桥输出上生成三个近似正弦交流波形,并具有所需的 120 度相位偏移。
每个微控制器 PWM 输出的占空比都会变化,以控制所生成的交流信号的周期和幅度,进而确定电机的速度和扭矩。
操作原理
与三次谐波注入正弦 PWM 类似,空间矢量调制方法利用了大约 15% 以上的可用总线电压,因此提高了电机运行效率。
与注入三次谐波的正弦 PWM 不同,相电压的中性点被限制为总线电压的二分之一,如图 1 所示。
空间矢量调制不受 VBUS 和中心电压的限制,并且可以浮动在空间中,如图 2 所示。
与在逆变器的每个推/挽级中分别生成正弦电流的正弦 PWM 不同,空间矢量调制将整个逆变器作为单个单元进行操作以产生正弦电流。在此过程中,逆变器在六边形内的八种不同状态下运行,其中两种状态被称为零矢量,因为它们不产生电压,而六种状态则产生非零电压。
可以通过在六边形内创建旋转电压参考矢量来控制三相 BLDC 电机,该电压参考矢量的旋转速度决定电机旋转的频率。本应用笔记中讨论的空间矢量调制应用使用带有三个用于角度位置反馈的霍尔传感器的 BLDC 型电机。
讨论
电动机由定子和固定框架组成,其中旋转部件或转子安装在带有轴承的轴上。在三相 BLDC 电机中,定子配有三组电感器绕组,由三个交流电压输入供电,这些电压输入彼此相位偏移 120 度,以产生旋转磁通量场。该定子磁通场对转子的永磁体磁通场施加磁力,从而在输出轴上产生扭矩。
在三相电机控制应用中,电机的输入电压由三相逆变桥产生。该桥包含三个互补的源极/漏极晶体管对,它们将接地或总线电压 DC 连接到其三个输出中的每一个,以响应来自微控制器的数字控制信号。Z32F128 ARM MCU 在电桥控制信号上使用 PWM,在电桥输出上生成三个近似正弦交流波形,并具有所需的 120 度相位偏移。
每个微控制器 PWM 输出的占空比都会变化,以控制所生成的交流信号的周期和幅度,进而确定电机的速度和扭矩。
操作原理
与三次谐波注入正弦 PWM 类似,空间矢量调制方法利用了大约 15% 以上的可用总线电压,因此提高了电机运行效率。
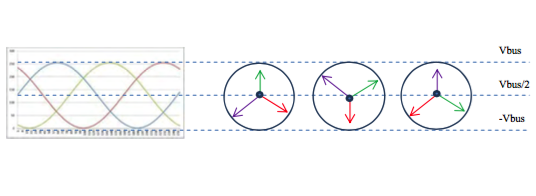
与注入三次谐波的正弦 PWM 不同,相电压的中性点被限制为总线电压的二分之一,如图 1 所示。
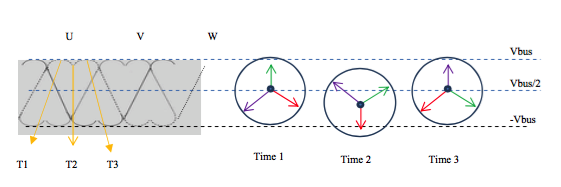
空间矢量调制不受 VBUS 和中心电压的限制,并且可以浮动在空间中,如图 2 所示。
与在逆变器的每个推/挽级中分别生成正弦电流的正弦 PWM 不同,空间矢量调制将整个逆变器作为单个单元进行操作以产生正弦电流。在此过程中,逆变器在六边形内的八种不同状态下运行,其中两种状态被称为零矢量,因为它们不产生电压,而六种状态则产生非零电压。
关键词:Z32F128 微控制器
版权与免责声明
凡本网注明“出处:维库电子市场网”的所有作品,版权均属于维库电子市场网,转载请必须注明维库电子市场网,https://www.dzsc.com,违反者本网将追究相关法律责任。
本网转载并注明自其它出处的作品,目的在于传递更多信息,并不代表本网赞同其观点或证实其内容的真实性,不承担此类作品侵权行为的直接责任及连带责任。其他媒体、网站或个人从本网转载时,必须保留本网注明的作品出处,并自负版权等法律责任。
如涉及作品内容、版权等问题,请在作品发表之日起一周内与本网联系,否则视为放弃相关权利。
相关技术资料
- 无刷电机内转子和外转子的区别2025/9/5 17:28:53
- 无刷直流电机中反电动势的定义2025/9/4 17:09:16
- 电气控制原理图要怎么变成接线图呢?2025/9/1 16:57:43
- 深入探究碳化硅在电机驱动系统中的卓越应用2025/9/1 16:38:08
- 碳化硅在电机驱动领域的应用新格局2025/8/29 16:36:18
技术分类
广告

热门技术资料


