





HJMR2300 三轴数字磁强计的功能与应用
出处:网络整理 发布于:2025-08-11 16:18:45

图 1 HJMR2300 整体示意图
2. 电原理图
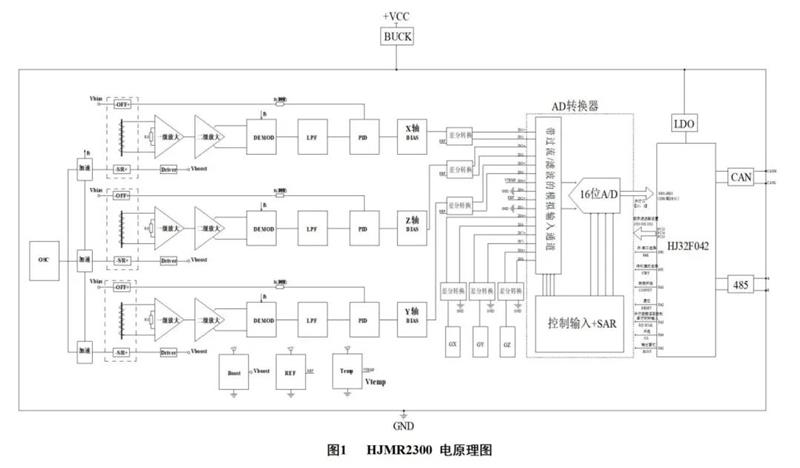
图 2 HJMR2300 电原理图
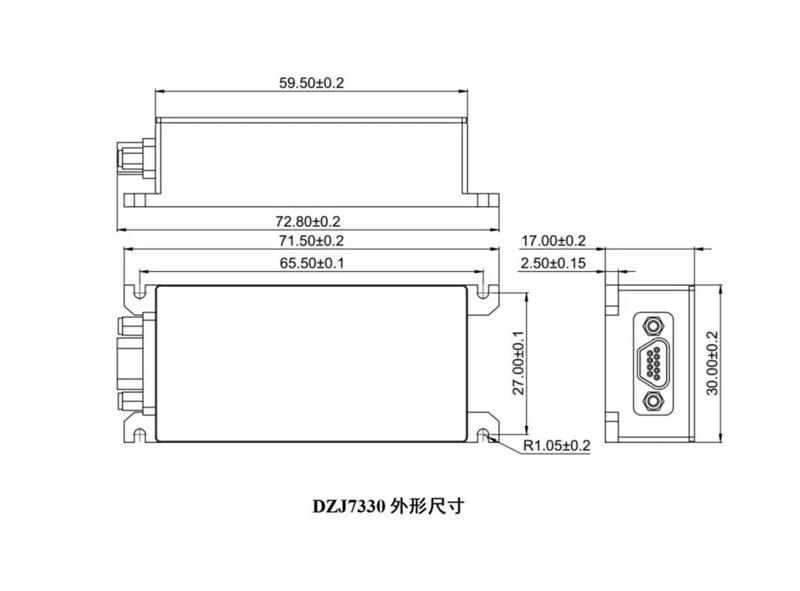
3. 封装形式及引出端功能


4. 额定值
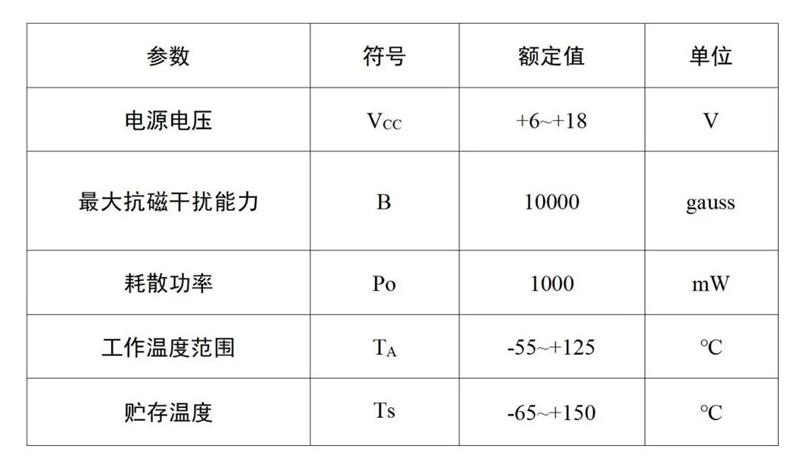
图 6 HJMR2300 额定值
5. 电特性
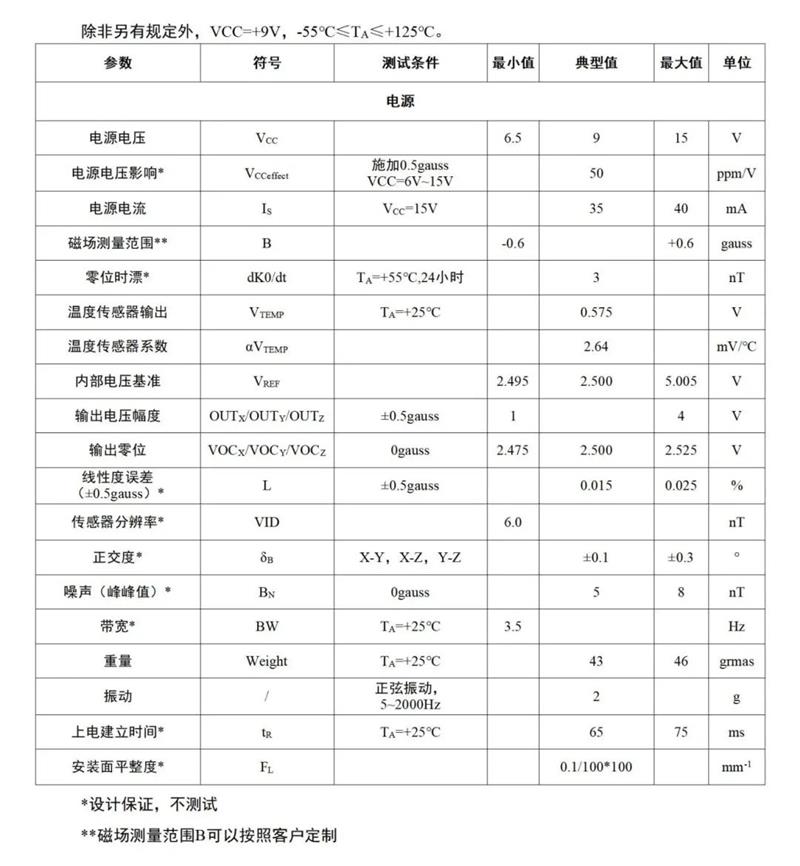
图 7 HJMR2300 电特性
6. 数据格式
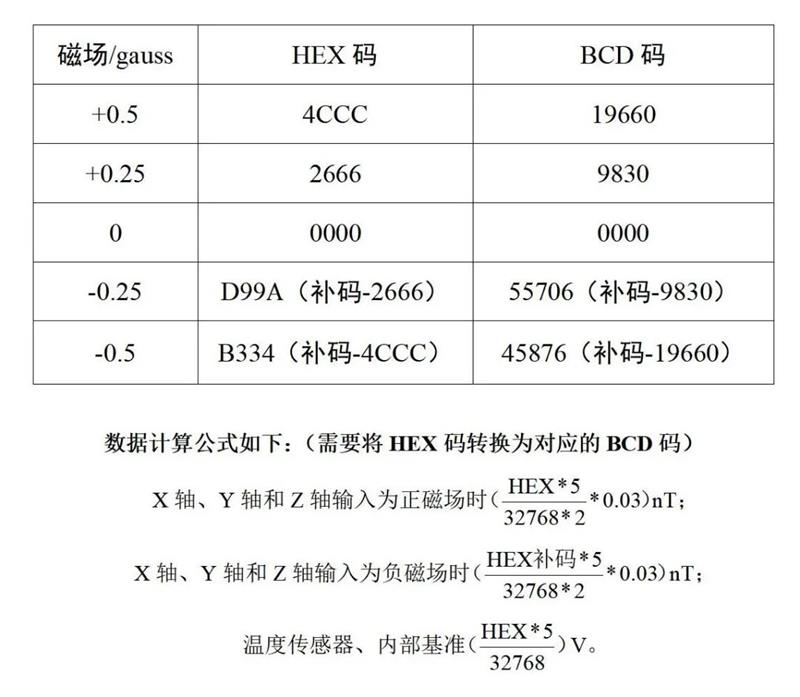
图 8 HJMR2300 数据格式
7. 通讯时序
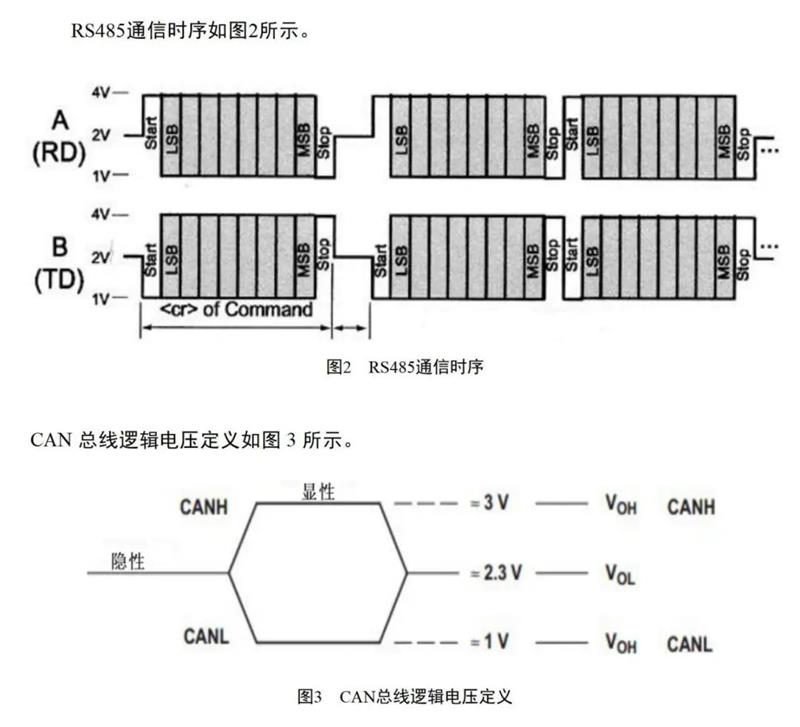
图 9 HJMR2300 通讯时序
8. 典型应用
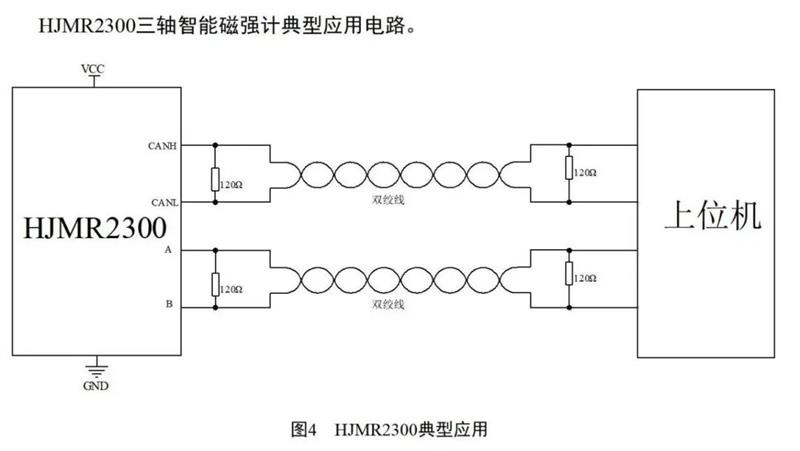
图 10 HJMR2300 典型应用
9. 无干扰实测
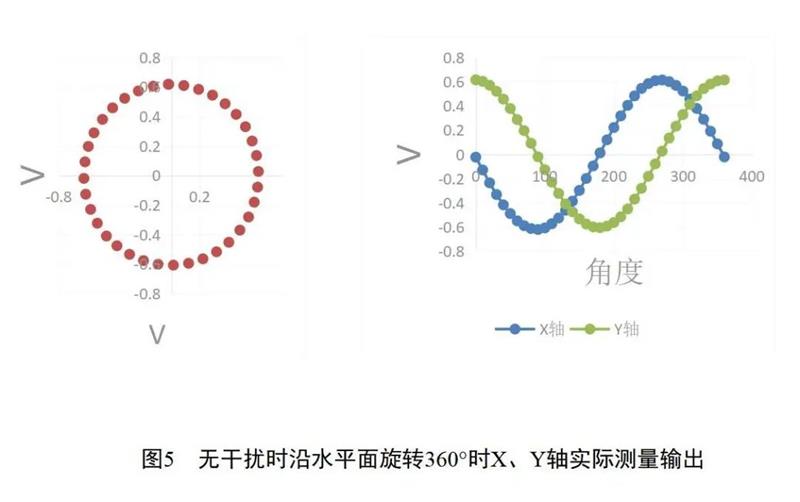
图 11 HJMR2300 无干扰实测
10. 注意事项
关键词: 三轴数字磁强计
上一篇:热过载继电器到底是什么
下一篇:变压器的功率及损耗分析
版权与免责声明
凡本网注明“出处:维库电子市场网”的所有作品,版权均属于维库电子市场网,转载请必须注明维库电子市场网,https://www.dzsc.com,违反者本网将追究相关法律责任。
本网转载并注明自其它出处的作品,目的在于传递更多信息,并不代表本网赞同其观点或证实其内容的真实性,不承担此类作品侵权行为的直接责任及连带责任。其他媒体、网站或个人从本网转载时,必须保留本网注明的作品出处,并自负版权等法律责任。
如涉及作品内容、版权等问题,请在作品发表之日起一周内与本网联系,否则视为放弃相关权利。
相关技术资料
- 电表互感器匝数倍率怎么看?2025/9/5 17:05:11
- 颜色传感器原理及实际应用案例2025/9/5 16:09:23
- 调谐器和调制器的区别2025/9/4 17:25:45
- 有载变压器和无载变压器的区别有哪些2025/9/4 17:13:35
- 什么是晶体谐振器?晶体谐振器的作用2025/9/4 16:57:42
技术分类
广告

热门技术资料


