





通过电容式传感测量加速度
出处:维库电子市场网 发布于:2024-11-29 16:55:02 | 523 次阅读
加速度计可用于不同的应用领域。例如,在汽车应用中,加速度计用于激活安全气囊系统。相机使用加速度计对照片进行主动稳定。计算机硬盘驱动器还依靠加速度计来检测可能损坏设备读/写头的外部冲击。在这种情况下,当发生外部冲击时,加速度计会暂停驱动器运行。这些只是加速度计的几个应用。
这些设备的用途实际上有无限的可能性。微加工技术的巨大进步使当今小型、低成本的微机械加速度计成为可能。事实上,小尺寸和低成本是使我们能够将这些器件应用于如此广泛的应用的两个主要因素。
在本文中,我们将了解测量加速度的物理原理。我们将了解质量-弹簧-阻尼器(也称为质量-阻尼器-弹簧)结构如何将加速度转换为位移量,以及如何应用电容传感方法将此位移转换为与施加的加速度成正比的电信号。
使用质量弹簧阻尼器测量加速度
如图 1 所示的质量-弹簧-阻尼器结构可用于测量加速度。
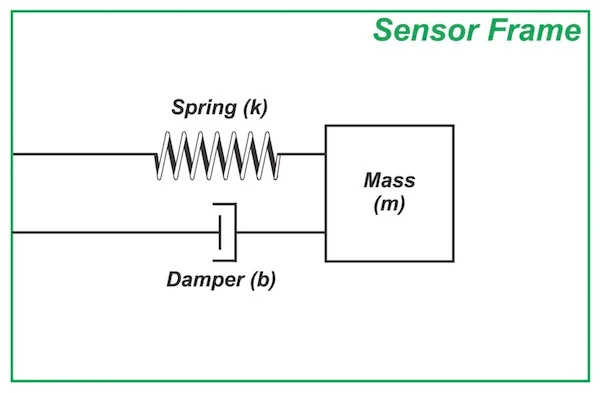 图 1. 质量-弹簧-阻尼器结构
图 1. 质量-弹簧-阻尼器结构
已知质量,通常称为验证质量(或测试质量),通过弹簧连接到传感器框架。
尽管阻尼器是该系统的重要组成部分,但我们将将其搁置到本系列的下一篇文章,因为它对于 EE 来说可能有点神秘,并且可能需要几段来介绍阻尼器的基本概念。
让我们看看图 1 中所示的结构如何检测加速度。 当传感器框架因外力而加速时,由于惯性,可靠质量往往会“向后移动”。这会改变质量块相对于传感器框架的相对位置,如下图所示。
图 2(a) 显示了在没有外力时其静止位置的可靠质量。如图 2(b) 所示,当对框架施加外力时,框架向右加速。质量体最初倾向于保持静止,这会改变质量体相对于框架的相对位置 (d2< d1).
传感器的非惯性(即加速)坐标系中的观察者观察到,验证质量块被移动到其静止位置的左侧。由于验证质量位移,弹簧被压缩,并施加与验证质量上的位移成正比的力。弹簧施加的力将验证质量向右推,并使其沿外力的方向加速。
如果为系统的不同参数选择了适当的值,则验证质量位移将与框架加速度值成正比(在系统的瞬态响应消失后)。
总而言之,质量-弹簧-阻尼器结构将传感器框架的加速度转换为验证质量位移。剩下的问题是,我们如何测量这种位移?
测量 Proof 质量位移:电容式传感方法
验证质量位移可以通过多种方式进行测量。一种常见的方法是图 3 中描述的电容式传感方法。
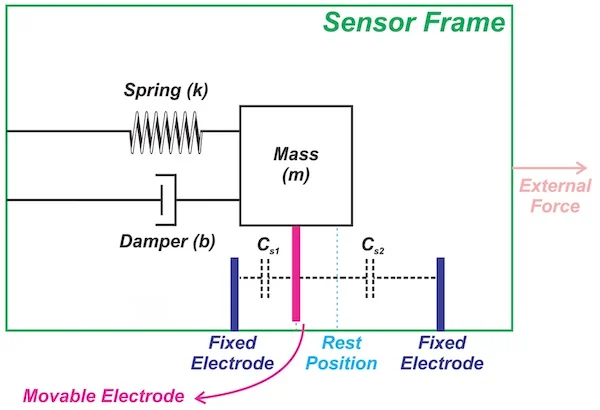 图 3
图 3
有两个电极固定在传感器框架上,还有一个连接到验证质量块的可移动电极。这会产生两个电容器 CS1 系列和 CS2 系列,如图 3 所示。
当质量块沿一个方向移动时,可移动电极和一个固定电极之间的电容增加,而另一个电容器的电容减小。这就是为什么我们只需要测量感应电容器的变化来检测与输入加速度成正比的验证质量位移。
使用同步解调的加速度计信号调节
为了准确测量检测电容的变化,我们可以应用同步解调技术。图 4 显示了 Analog Devices 的 ADXL 系列加速度计中采用的信号调理的简化版本。
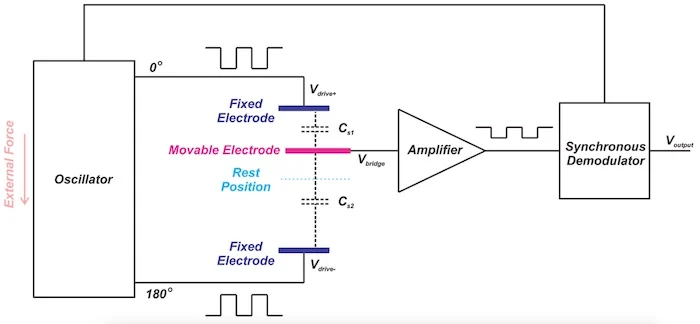 图 4. 图片(改编)由 Analog Devices 提供
图 4. 图片(改编)由 Analog Devices 提供
在这种情况下,1 MHz 方波用作感应电容器 C 的交流激励S1 系列和 CS2 系列.施加到固定电极上的方波具有相同的振幅,但彼此相差 180°。当可移动电极处于静止位置时,放大器输入端的电压为零伏。
当可移动电极靠近其中一个固定电极时,来自该电极的激励电压的较大部分出现在放大器输入 V 处桥,这意味着放大器输入端出现的方波与较近电极的激励电压同相。
例如,在图 4 中,放大输出是一个与 V 同相的方波驱动+因为 CS1 系列大于 CS2 系列.
V 的振幅桥是 PROOF 质量位移的函数;但是,我们还需要知道 V 的相位关系桥相对于 V驱动+和 V驾驶-确定可靠质量块的位移方向。
同步解调器基本上将放大器输出乘以激励电压 (V驱动+或 V驾驶-) 将放大器输出端的方波转换为直流电压,从而显示位移量及其方向。
要了解同步解调如何实现这一目标,请参阅我关于 LVDT 解调技术的文章:LVDT 解调:整流器型与同步解调。
为什么我们不使用单个传感电容器?
图 3 中描述的电容式传感具有差分性质:当 CS1 系列增加,CS2 系列减少,反之亦然。
也可以采用单端电容感应,其中省略了一个固定电极,因此只有一个可变电容器。在这种情况下,我们可以对系统进行建模,如图 5 所示。
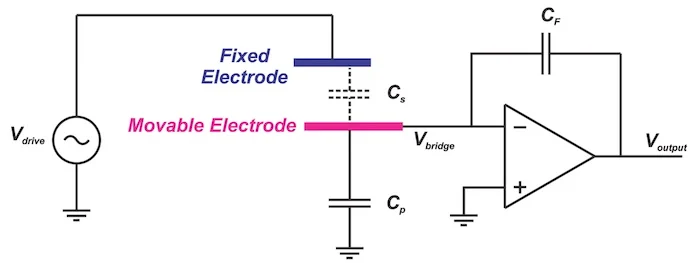 图 5
图 5
这个单端版本似乎是一个更简单的解决方案。那么,为什么我们不使用单个传感电容器呢?
单传感电容器结构:非线性输出
让我们更仔细地研究一下这个电路。
在上图中,Cp模拟从可移动电极到地的总寄生电容。理想情况下,V桥位于虚拟 ground 上,我们可以忽略 Cp因为它的一侧是 ground,另一侧是 virtual ground。
因此,输出可以简单地获得为:
\[ V_{输出} = -\frac{C_s}{C_F} V_{驱动器}\]
方程 1
请注意,偏置电流路径未显示在图 5 中。使用电容器基本方程,我们可以用验证质量位移来表示输出。
对于电容器 C,我们有:
\[ C = \epsilon \frac{A}{d}\]
方程 2
其中 ε 是介电常数,A 是平行板面积,d 是两个导电板之间的距离。为简单起见,假设两个电容器 Cs和 CF具有相同的 ε 和 A。
然后,方程 1 可以简化为:
\[ V_{输出} = -\frac{d_F}{d_s} V_{驱动器}\]
其中 dF和 ds表示 C 的电极之间的距离F和 Cs分别。ds可以表示为初始距离 d 之和0和位移值 Δd。
从那里我们可以获得:
\[ V_{输出} = -\frac{d_F}{d_0 + \Delta d} V_{驱动器}\]
如您所见,位移项 (Δd) 位于输出方程的分母中。因此,输出是验证质量位移 Δd 的非线性函数。
差分结构:线性输出
我们来看看图 4 中描述的差分电容感应的传递函数。
您可以验证,通过差分电容感应,V桥由下式给出:
\[ V_{bridge} = \frac{C_{s1} V_{drive+} + C_{s2} V_{drive-}}{C_{s1} + C_{s2}} \]
应用公式 2 并假设两个电容 CS1 系列和 CS2 系列具有相同的 ε 和 A 值,我们得到:
\[ V_{bridge} = \frac{d_{s2} V_{drive+} + s_{s1} V_{drive-}}{d_{s1} + d_{s2}} \]
方程 3
其中 dS1 系列和 dS2 系列表示 C 的电极之间的距离S1 系列和 CS2 系列分别。当 dS1 系列增加,dS2 系列减少相同的量,反之亦然。
假设:
\[ d_{s1} = d_0 - \Delta d \]
\[ d_{s2} = d_0 + \Delta d \]
\[ V_{驱动器+} = - V_{驱动器-} \]
公式 3 简化为:
\[ V_{bridge} = \frac{\Delta d}{d_0} V_{drive+} \]
如您所见,在差分结构中,输出电压是验证质量位移 Δd 的线性函数。请注意,虽然我们可以使用软件来消除传感器线性误差,但线性响应是可取的,因为它可以提高测量精度并促进系统校准。
这些设备的用途实际上有无限的可能性。微加工技术的巨大进步使当今小型、低成本的微机械加速度计成为可能。事实上,小尺寸和低成本是使我们能够将这些器件应用于如此广泛的应用的两个主要因素。
在本文中,我们将了解测量加速度的物理原理。我们将了解质量-弹簧-阻尼器(也称为质量-阻尼器-弹簧)结构如何将加速度转换为位移量,以及如何应用电容传感方法将此位移转换为与施加的加速度成正比的电信号。
使用质量弹簧阻尼器测量加速度
如图 1 所示的质量-弹簧-阻尼器结构可用于测量加速度。
图 1. 质量-弹簧-阻尼器结构已知质量,通常称为验证质量(或测试质量),通过弹簧连接到传感器框架。
尽管阻尼器是该系统的重要组成部分,但我们将将其搁置到本系列的下一篇文章,因为它对于 EE 来说可能有点神秘,并且可能需要几段来介绍阻尼器的基本概念。
让我们看看图 1 中所示的结构如何检测加速度。 当传感器框架因外力而加速时,由于惯性,可靠质量往往会“向后移动”。这会改变质量块相对于传感器框架的相对位置,如下图所示。
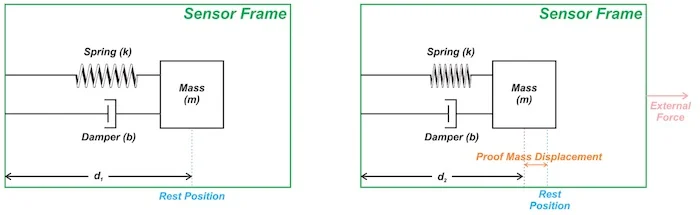
图 2(a) 显示了在没有外力时其静止位置的可靠质量。如图 2(b) 所示,当对框架施加外力时,框架向右加速。质量体最初倾向于保持静止,这会改变质量体相对于框架的相对位置 (d2< d1).
传感器的非惯性(即加速)坐标系中的观察者观察到,验证质量块被移动到其静止位置的左侧。由于验证质量位移,弹簧被压缩,并施加与验证质量上的位移成正比的力。弹簧施加的力将验证质量向右推,并使其沿外力的方向加速。
如果为系统的不同参数选择了适当的值,则验证质量位移将与框架加速度值成正比(在系统的瞬态响应消失后)。
总而言之,质量-弹簧-阻尼器结构将传感器框架的加速度转换为验证质量位移。剩下的问题是,我们如何测量这种位移?
测量 Proof 质量位移:电容式传感方法
验证质量位移可以通过多种方式进行测量。一种常见的方法是图 3 中描述的电容式传感方法。
图 3有两个电极固定在传感器框架上,还有一个连接到验证质量块的可移动电极。这会产生两个电容器 CS1 系列和 CS2 系列,如图 3 所示。
当质量块沿一个方向移动时,可移动电极和一个固定电极之间的电容增加,而另一个电容器的电容减小。这就是为什么我们只需要测量感应电容器的变化来检测与输入加速度成正比的验证质量位移。
使用同步解调的加速度计信号调节
为了准确测量检测电容的变化,我们可以应用同步解调技术。图 4 显示了 Analog Devices 的 ADXL 系列加速度计中采用的信号调理的简化版本。
图 4. 图片(改编)由 Analog Devices 提供在这种情况下,1 MHz 方波用作感应电容器 C 的交流激励S1 系列和 CS2 系列.施加到固定电极上的方波具有相同的振幅,但彼此相差 180°。当可移动电极处于静止位置时,放大器输入端的电压为零伏。
当可移动电极靠近其中一个固定电极时,来自该电极的激励电压的较大部分出现在放大器输入 V 处桥,这意味着放大器输入端出现的方波与较近电极的激励电压同相。
例如,在图 4 中,放大输出是一个与 V 同相的方波驱动+因为 CS1 系列大于 CS2 系列.
V 的振幅桥是 PROOF 质量位移的函数;但是,我们还需要知道 V 的相位关系桥相对于 V驱动+和 V驾驶-确定可靠质量块的位移方向。
同步解调器基本上将放大器输出乘以激励电压 (V驱动+或 V驾驶-) 将放大器输出端的方波转换为直流电压,从而显示位移量及其方向。
要了解同步解调如何实现这一目标,请参阅我关于 LVDT 解调技术的文章:LVDT 解调:整流器型与同步解调。
为什么我们不使用单个传感电容器?
图 3 中描述的电容式传感具有差分性质:当 CS1 系列增加,CS2 系列减少,反之亦然。
也可以采用单端电容感应,其中省略了一个固定电极,因此只有一个可变电容器。在这种情况下,我们可以对系统进行建模,如图 5 所示。
图 5这个单端版本似乎是一个更简单的解决方案。那么,为什么我们不使用单个传感电容器呢?
单传感电容器结构:非线性输出
让我们更仔细地研究一下这个电路。
在上图中,Cp模拟从可移动电极到地的总寄生电容。理想情况下,V桥位于虚拟 ground 上,我们可以忽略 Cp因为它的一侧是 ground,另一侧是 virtual ground。
因此,输出可以简单地获得为:
\[ V_{输出} = -\frac{C_s}{C_F} V_{驱动器}\]
方程 1
请注意,偏置电流路径未显示在图 5 中。使用电容器基本方程,我们可以用验证质量位移来表示输出。
对于电容器 C,我们有:
\[ C = \epsilon \frac{A}{d}\]
方程 2
其中 ε 是介电常数,A 是平行板面积,d 是两个导电板之间的距离。为简单起见,假设两个电容器 Cs和 CF具有相同的 ε 和 A。
然后,方程 1 可以简化为:
\[ V_{输出} = -\frac{d_F}{d_s} V_{驱动器}\]
其中 dF和 ds表示 C 的电极之间的距离F和 Cs分别。ds可以表示为初始距离 d 之和0和位移值 Δd。
从那里我们可以获得:
\[ V_{输出} = -\frac{d_F}{d_0 + \Delta d} V_{驱动器}\]
如您所见,位移项 (Δd) 位于输出方程的分母中。因此,输出是验证质量位移 Δd 的非线性函数。
差分结构:线性输出
我们来看看图 4 中描述的差分电容感应的传递函数。
您可以验证,通过差分电容感应,V桥由下式给出:
\[ V_{bridge} = \frac{C_{s1} V_{drive+} + C_{s2} V_{drive-}}{C_{s1} + C_{s2}} \]
应用公式 2 并假设两个电容 CS1 系列和 CS2 系列具有相同的 ε 和 A 值,我们得到:
\[ V_{bridge} = \frac{d_{s2} V_{drive+} + s_{s1} V_{drive-}}{d_{s1} + d_{s2}} \]
方程 3
其中 dS1 系列和 dS2 系列表示 C 的电极之间的距离S1 系列和 CS2 系列分别。当 dS1 系列增加,dS2 系列减少相同的量,反之亦然。
假设:
\[ d_{s1} = d_0 - \Delta d \]
\[ d_{s2} = d_0 + \Delta d \]
\[ V_{驱动器+} = - V_{驱动器-} \]
公式 3 简化为:
\[ V_{bridge} = \frac{\Delta d}{d_0} V_{drive+} \]
如您所见,在差分结构中,输出电压是验证质量位移 Δd 的线性函数。请注意,虽然我们可以使用软件来消除传感器线性误差,但线性响应是可取的,因为它可以提高测量精度并促进系统校准。
0次
版权与免责声明
凡本网注明“出处:维库电子市场网”的所有作品,版权均属于维库电子市场网,转载请必须注明维库电子市场网,https://www.dzsc.com,违反者本网将追究相关法律责任。
本网转载并注明自其它出处的作品,目的在于传递更多信息,并不代表本网赞同其观点或证实其内容的真实性,不承担此类作品侵权行为的直接责任及连带责任。其他媒体、网站或个人从本网转载时,必须保留本网注明的作品出处,并自负版权等法律责任。
如涉及作品内容、版权等问题,请在作品发表之日起一周内与本网联系,否则视为放弃相关权利。

电路图分类
广告

热门电路图
最新电路图


