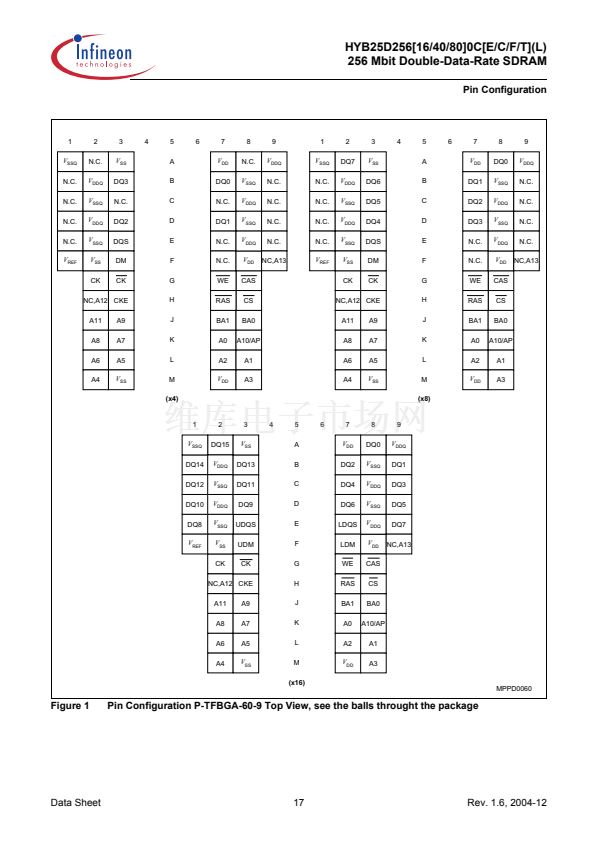
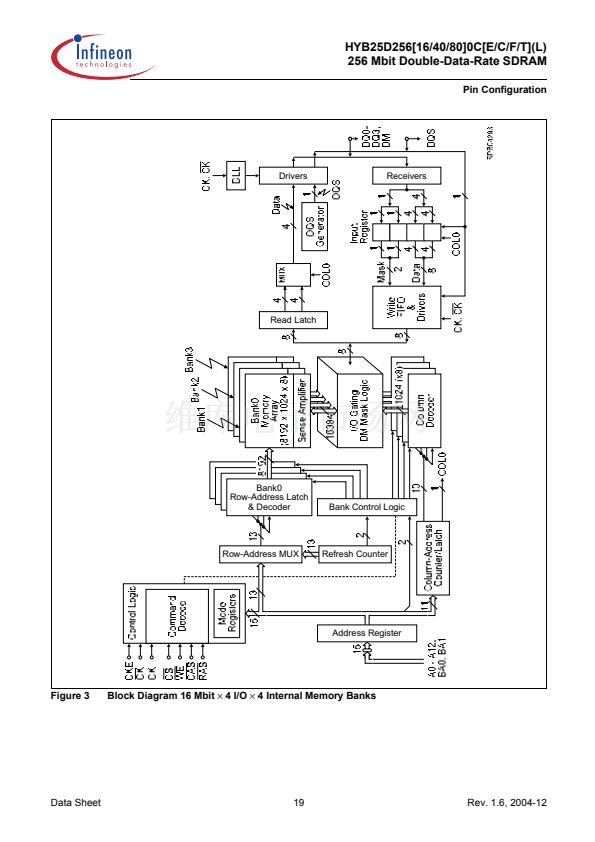
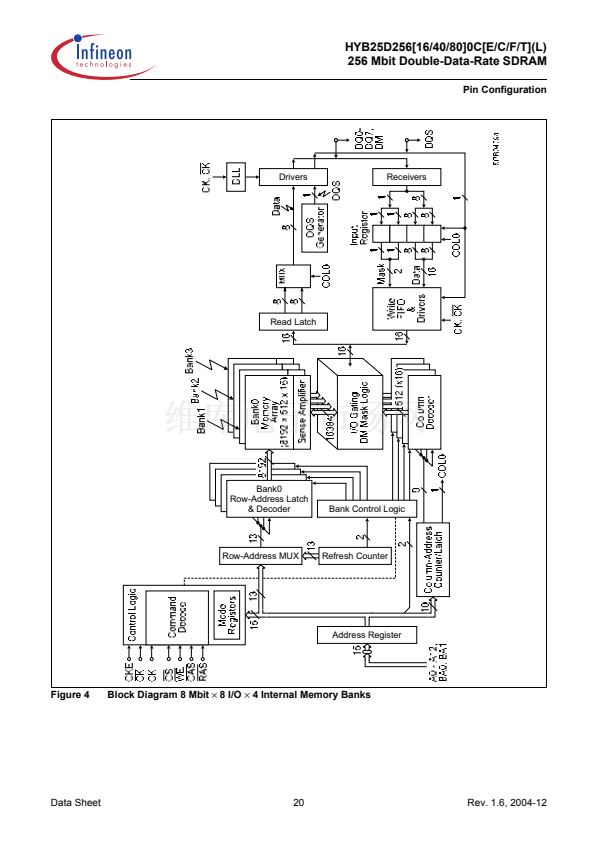
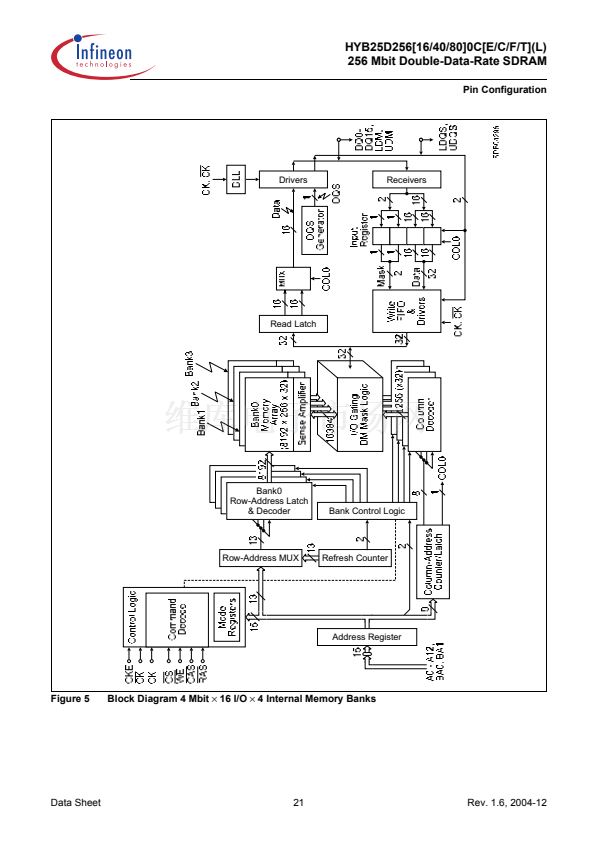
HYB25D256[16/40/80]0C[E/C/F/T](L)
256 Mbit Double-Data-Rate SDRAM
Functional Description
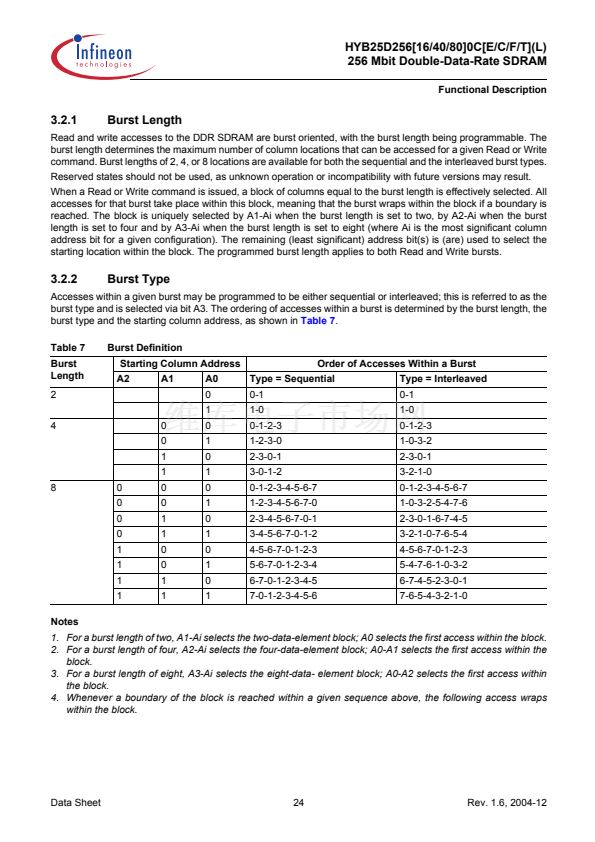
3.2.3
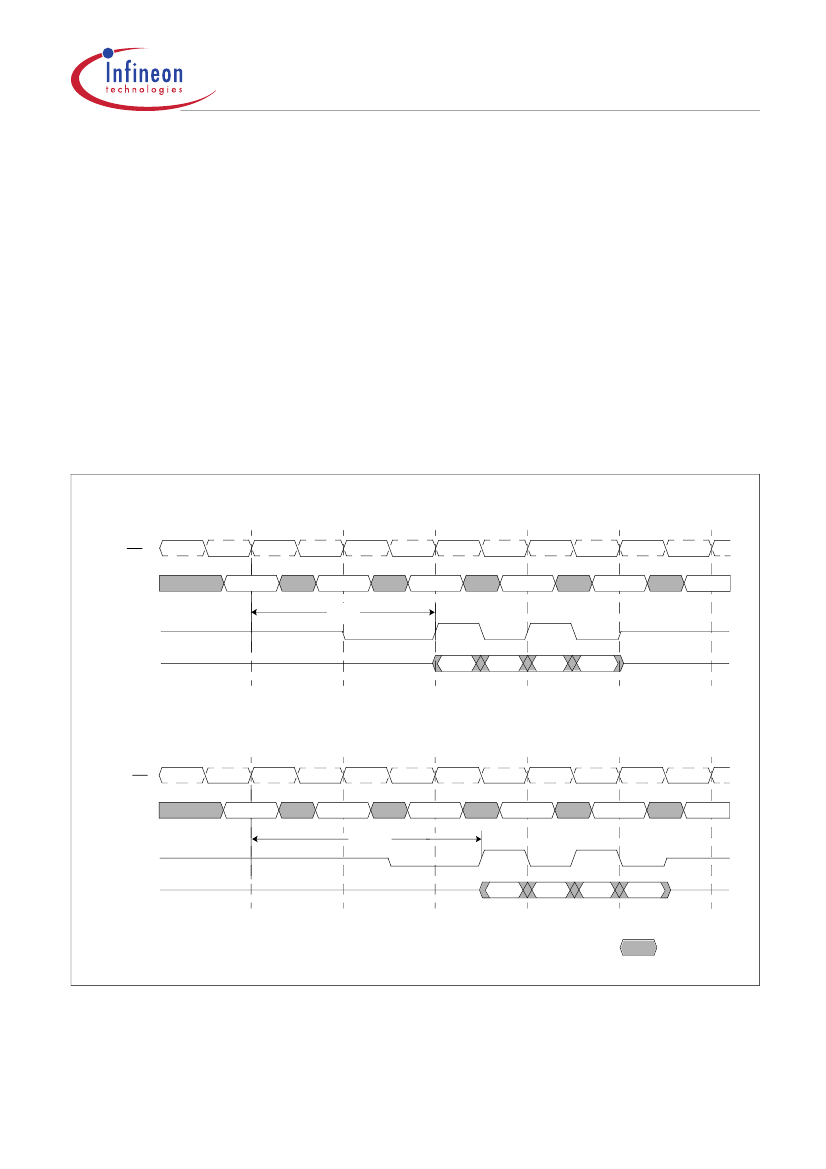
Read Latency
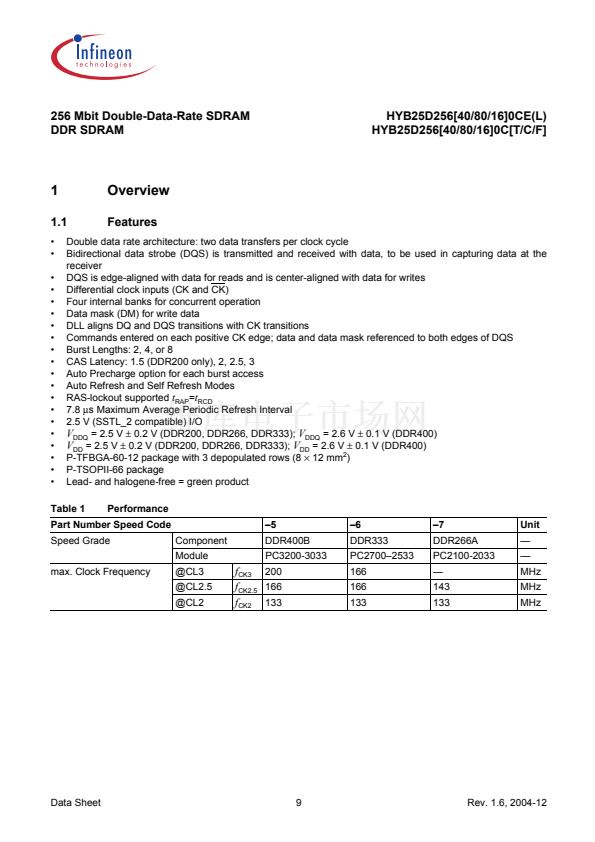
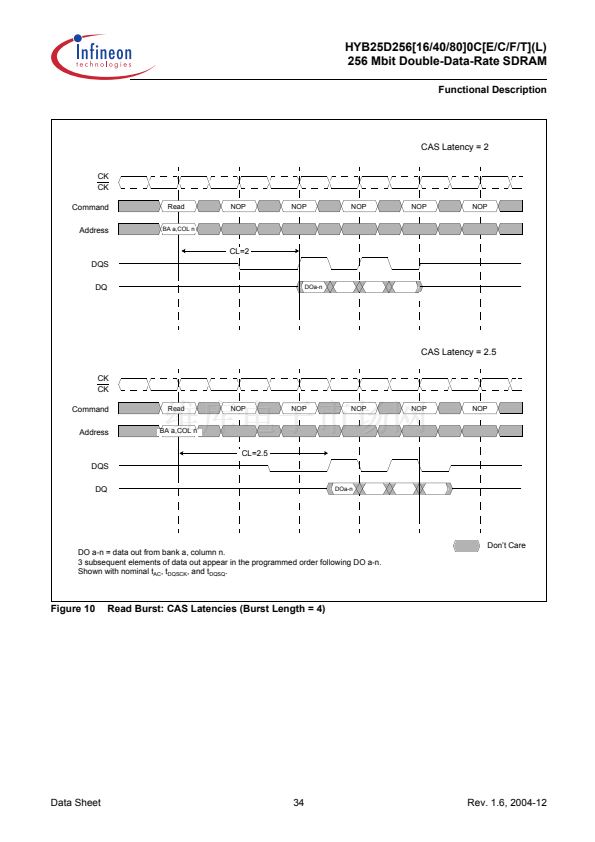
The Read latency, or CAS latency, is the delay, in clock cycles, between the registration of a Read command and
the availability of the first burst of output data. The latency can be programmed 2, 2.5 and 3 clocks. CAS latency
of 1.5 is supported for DDR200 components only.
If a Read command is registered at clock edge n, and the latency is
m
clocks, the data is available nominally
coincident with clock edge
n + m
(see
Figure 6).
Reserved states should not be used as unknown operation or incompatibility with future versions may result.
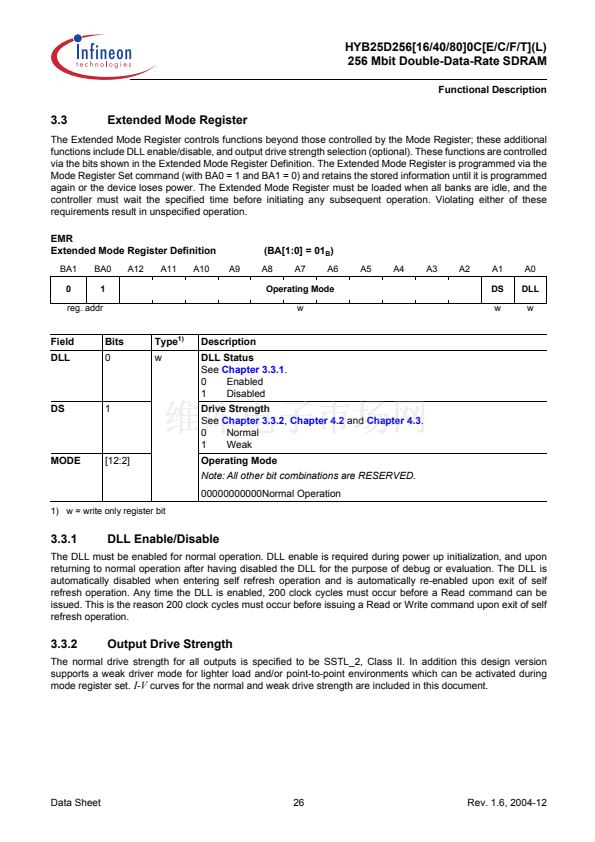
3.2.4
Operating Mode
The normal operating mode is selected by issuing a Mode Register Set Command with bits A7-A12 set to zero,
and bits A0-A6 set to the desired values. A DLL reset is initiated by issuing a Mode Register Set command with
bits A7 and A9-A12 each set to zero, bit A8 set to one, and bits A0-A6 set to the desired values. A Mode Register
Set command issued to reset the DLL should always be followed by a Mode Register Set command to select
normal operating mode.
All other combinations of values for A7-A12 are reserved for future use and/or test modes. Test modes and
reserved states should not be used as unknown operation or incompatibility with future versions may result.
CAS Latency = 2, BL = 4
CK
CK
Command
Read
NOP
CL=2
DQS
DQ
NOP
NOP
NOP
NOP
CAS Latency = 2.5, BL = 4
CK
CK
Command
Read
NOP
CL=2.5
DQS
DQ
NOP
NOP
NOP
NOP
Shown with nominal t
AC
, t
DQSCK
, and t
DQSQ
.
Don鈥檛 Care
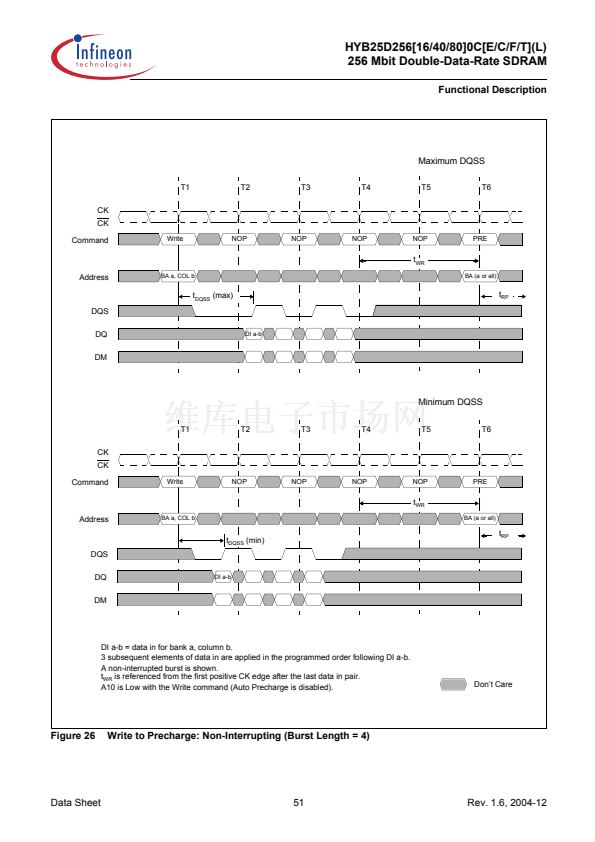
Figure 6
Required CAS Latencies
Data Sheet
25
Rev. 1.6, 2004-12









 1
1
 2
2
 3
3
 4
4
 5
5
 6
6
 7
7
 8
8
 9
9
 10
10
 11
11
 12
12
 13
13
 14
14
 15
15
 16
16
 17
17
 18
18
 19
19
 20
20
 21
21
 22
22
 23
23
 24
24
 25
25
 26
26
 27
27
 28
28
 29
29
 30
30
 31
31
 32
32
 33
33
 34
34
 35
35
 36
36
 37
37
 38
38
 39
39
 40
40
 41
41
 42
42
 43
43
 44
44
 45
45
 46
46
 47
47
 48
48
 49
49
 50
50
 51
51
 52
52
 53
53
 54
54
 55
55
 56
56
 57
57
 58
58
 59
59
 60
60
 61
61
 62
62
 63
63
 64
64
 65
65
 66
66
 67
67
 68
68
 69
69
 70
70
 71
71
 72
72
 73
73
 74
74
 75
75
 76
76
 77
77
 78
78
 79
79
 80
80
 81
81
 82
82
 83
83
 84
84
 85
85
 86
86
 87
87
 88
88
 89
89
 90
90
 91
91
 92
92
 93
93
 94
94
