





英飞凌PMSM电机控制系统的解决方案
出处:elecfans 发布于:2017-09-20 11:59:50
永磁同步电机的特性决定了控制系统的复杂性,较为常见的PMSM主要由驱动器、主控制器(逻辑控制板)及各种传感器(电流传感器,温度传感器和旋变绕组等) 等组成,图2所示为推出的应用于在EV和HEV上PMSM电机控制系统的解决方案:
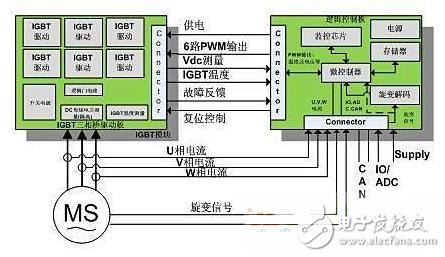
图 2 PMSM电机控制系统
在上图所示方案中,驱动器由IGBT三相桥驱动板,HybridPACK2 IGBT(简称HP2)模块和直流母线电容组成。IGBT三相桥驱动板包括6通道的IGBT预驱动电路,开关电源SMPS,逻辑门电路,故障检测电路,电压及温度测量电路。由六个IGBT单元组成驱动PMSM电机的三相桥臂的HP2模块是英飞凌专门为EV和HEV应用而设计的大功率模块,其工作电压为650 V,额定功率为80KW,模块的运行结温为150℃。主控制器则搭载了英飞凌32位新型单片机TC1782(Audo-MAX系列)的系统电路,旋变解码电路,支持ISO26262功能安全解决方案的监控电路和传感器接口电路等。
主芯片选型
PMSM电机的控制要求主控制器不仅有强大的适合电机控制的专用外设,而且有很强的实时性能。TC1782是一款哈弗架构且有非对称双核(主核Tricore和外设控制协处理器PCP)的高性能32位单片机,主频高达180MHz,内置浮点运算单元FPU,支持DSP算法指令,2.5M字节FLASH,176K字节RAM。
TC1782与电机控制相关的重要外设主要是通用时间阵列GPTA和数模转换ADC。GPTA提供一套灵活的定时,比较和捕获功能,可以灵活地组合成信号检测单元和信号发生单元,应用于电机控制时可以支持动态控制的死区时间和不同于边沿对齐和中央对齐的非对称PWM输出。由硬件触发(如GPTA)并实现同步转换的数模转换模块ADC至少可以支持在电机应用中两相电流的同时获取。图3中所示为电机控制的一个单周期时序,GPTA生成一相带死区的互补式PWM波形,在PWM中点同时触发ADC0和ADC1的转换,ADC模块在完成对应通道转换后启动CPU中断服务程序。
TC1782的每个AD转换模块(ADC0和ADC1)都支持16 路转换通道,具有可编程的转换(8/10/12比特),12比特下快转换时间小于1微秒。专用外设控制协处理器PCP可以承担大部分中断负荷,从而主核可以集中处理用于电机控制的复杂运算,如Park变换,Clarke变换和空间矢量调制(SVM)等。目前TC1782微控制器受到了越来越多的汽车厂商和零部件供应商的关注,被国内外主流OEM和零部件供应商选为电动汽车驱动电机控制器的关键部件之一。
硬件设计
依照PMSM主控制器所需要的功能、实际参与控制的对象以及主控制芯片的特点,PMSM电机控制系统主控制器硬件结构如图4所示。它采用了功能划分和模块化的设计思想,并根据功能需求分离成不同的功能模块。主控制器的主要接口技术参数为:
1)14路模拟量输人通道(12比特);
2)6路PWM输出(带电平转换);
3)2路CAN通讯接口(支持标定和系统通讯);
4)可配置并行或串行通讯的旋变接口电路(AD2S1210);
5)数字量输入(故障检测与诊断等);
6)数字量输出(急停控制与主继电器控制等);
7)电源系统。
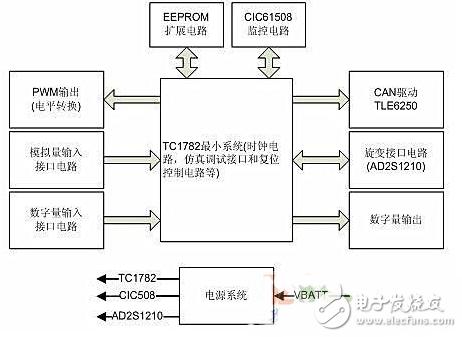
图4 主控制器硬件结构
PMSM电机控制系统要求具有较高的安全等级,驱动器对主控制器的故障响应时间有着严格的要求,因此主控制器采用了符合ISO26262功能安全规范的监控芯片CIC61508设计监控电路。CIC61508具有可配置的电压监控输入,可配置的主CPU任务执行时间和可配置的故障响应时间及输出,可以实时监控主CPU的供电和软件的运行状况,按照预先配置好的故障响应输出控制其他IC的使能与复位引脚,从而实现系统的功能安全要求。
软件设计
PMSM电机的控制系统方案主要以磁场定向控制FOC为主(图5), 另外为达到控制效果, 常常几种控制方案结合运用, 如采用转矩控制和弱磁控制原理(图6)以实现电机的效率和宽范围的调速方案, 集转矩控制和PWM 控制于一身的控制方案。
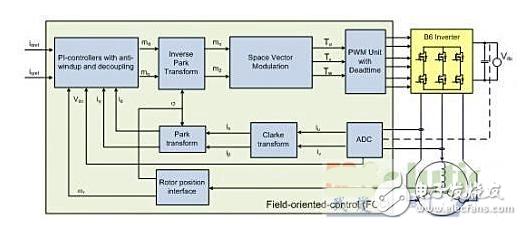
图5 磁场定向控制FOC

图6 转矩控制和弱磁控制
图5和图6中的PMSM电机控制系统方案中表明TC1782除了要完成和FOC相关的计算,如Clark,Park,i-Park和SVM[4]计算外,还需要对系统的一些信号进行采集,如相电流,母线电压,电机位置和转速等。另外考虑到主控制器参与系统通讯,以及功能安全上的要求,这些都将对单核CPU的负载是一个严峻的挑战。基于以上因素,按照主控制器的功能要求,将主控制器的软件开发模块化,分配给TC1782的主CPU和外设协处理器PCP,从而形成如图7所示的软件流程结构框架。
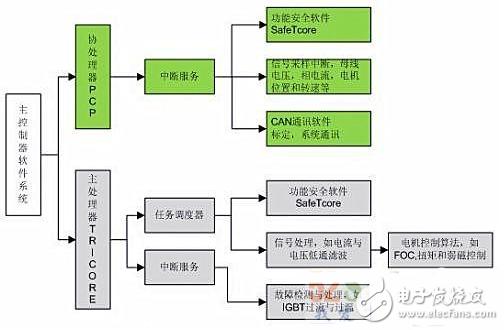
图7 主控制器软件系统架构
图7所示的软件系统架构中,主CPU在一个小型任务调度器的基础上,分别调用了英飞凌安全功能软件SafeTcore和PMSM电机控制相关算法软件,SafeTcore在CPU运行时循环检测系统的故障,测试项目可以依照要求进行配置,所运行的PMSM电机控制算法采用图5和图6中所示的控制策略进行。外设协处理器PCP除了运行安全功能软件SafeTcore软件监控主CPU的运行外,还可以处理和通讯相关的中断和信号采样中断等,从而降低主CPU的中断负载。
软件的旋变解码
如前所述,PMSM电机的位置和转速信息在电机控制中相当重要,旋变接口电路为获取这些信息提供了硬件解决方案。从ISO26262汽车功能安全规范要求的控制系统冗余性来看,需要提供第二种途径获取电机位置和转速信息,从而验证硬件解决方案获取的信息是否正确,提高系统的安全性,现有的欧洲电动车电机控制系统 常常使用软件的旋变解码作为硬件解码方案的备份。TC1782的高速FADC接口为这种方法提供了硬件基础,具体思路见图8所示:

图8 旋变信号的软件解码
上图所示的FIR变换及其后面的模块功能都是由软件来完成,CPU计算速度对PMSM这样的实时控制系统而言非常关键。多次测试发现,基于上述软件解码流程生成的TC1782软件代码在效率上可以达到5微妙的计算速度,效率上能够可以满足系统的应用要求。
测试验证
PMSM电机控制系统的测试在AVL的电机试验台上进行,其实物及系统架构如图9所示。母线电压和输入功率显示在Yokogawa的WT3000功率分析仪测试,电流传感器检测U相和V相电流,另外WT3000功率分析仪通过扭矩传感器和转速计测试PMSM电机的输出扭矩和转速。
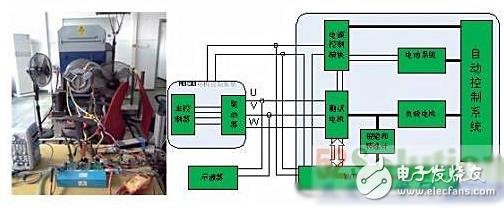
图9 电机测试台架系统
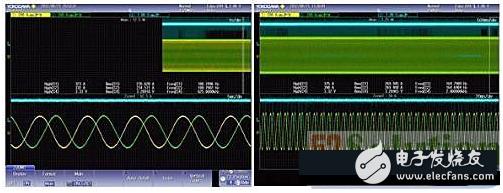
图10所示为母线电压230伏、不同电源输出功率下的相电流和电流频率值,左图为26千瓦下相电流有效值为235安,频率为100.75赫兹,右图为51千瓦下相电流有效值为270安,频率为164.8赫兹。
结束语
电动汽车电机控制系统是电动汽车的部件,本文针对用于PMSM电机控制系统的主控制器进行了如下的设计与研发工作:
1) 根据电动汽车动力系统的控制需求,提出了电机主控制器的设计原则及功能划分,在此基础上确定了基于TC1782的主控制器的硬件结构及接口。
2) 参照ISO26262安全功能规范,在TC1782和CIC61508功能安全监控芯片为硬件基础上,集成SafeTcore功能安全软件包。
3) 试验表明,该主控制器能够很好的适应电动汽车的应用环境,到达了对整车动力系统进行有效的控制与管理的设计目的。
上一篇:激光切割机按照结构如何分类?
下一篇:电机矢量控制的重要分析方法
版权与免责声明
凡本网注明“出处:维库电子市场网”的所有作品,版权均属于维库电子市场网,转载请必须注明维库电子市场网,https://www.dzsc.com,违反者本网将追究相关法律责任。
本网转载并注明自其它出处的作品,目的在于传递更多信息,并不代表本网赞同其观点或证实其内容的真实性,不承担此类作品侵权行为的直接责任及连带责任。其他媒体、网站或个人从本网转载时,必须保留本网注明的作品出处,并自负版权等法律责任。
如涉及作品内容、版权等问题,请在作品发表之日起一周内与本网联系,否则视为放弃相关权利。
- plc是什么工作原理和结构组成2024/4/25 17:27:54
- 直流电机工作原理与控制电路解析2024/4/25 17:21:49
- TI - MCU 如何在机器人电机控制设计中提高系统性能2024/4/24 15:56:54
- 三相电机:类型和工作原理2024/4/22 16:56:46
- 直流发电机组件2024/4/15 17:35:29



