





使用 ESP32 的蓝牙机器人汽车控制器
出处:维库电子市场网 发布于:2024-03-21 16:22:35 | 287 次阅读
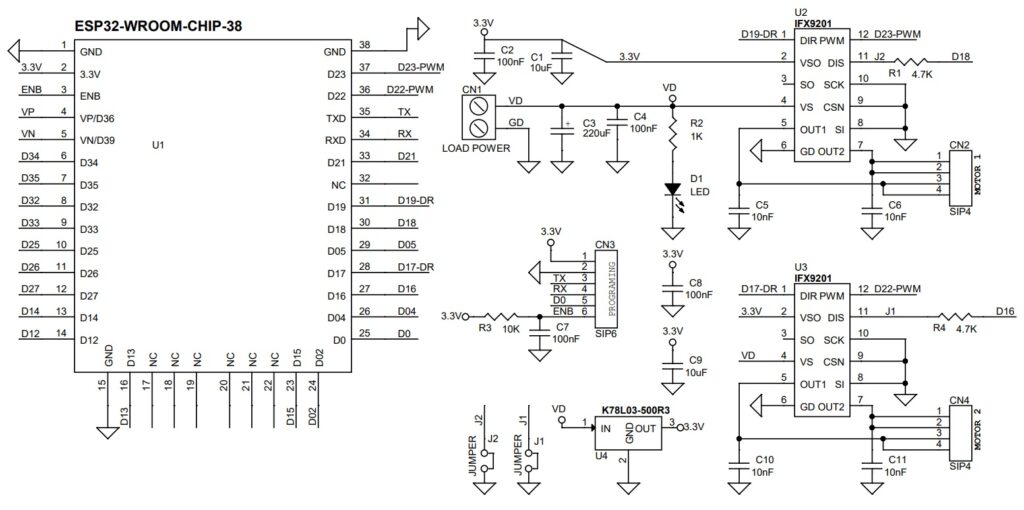
该无线机器人汽车控制器板使用ESP32 BT/Wi-Fi模块、2 x H 桥、3.3V 稳压器构建。它还包括 ESP32 编程连接器、电源 LED、用于电源的螺钉端子连接器、用于电机的插头连接器以及直流电源上用于平稳电机运行的高值电容器。工作电源为8V至24V DC。该项目有两个 H 新娘,每个可以驱动2.5A继续。该板适用于中小型机器人小车。它是一个开源硬件项目,可以根据要求进行编程。ESP32 I/O 详细信息可在说明中找到。ESP32 支持蓝牙连接,可以使用小型手机、笔记本电脑或平板电脑控制机器人汽车。该项目是使用 ESP32-Wroom 处理器构建的,该芯片支持蓝牙和 Wi-Fi 连接。
特征
电源 8V 至 24V 直流电机负载高达 2.5A,每个电机峰值 6Amps过流关断阈值 8AmpsH 桥无散热器PWM 频率高达 20Khz(经测试),ESP32 默认输出 500Hz主板电源 LED通过锁存行为过热关断,H 桥通过锁存行为短路关断,H 桥斩波器电流限制,H 桥VDD 欠压关断4 x 3 毫米安装孔PCB 尺寸 48.90 x 41.28 毫米
连接
CN1:引脚 1 VDD 8V 至 24V,引脚 2 = GNDCN2:引脚 1 和 2 = 电机 1,引脚 3 和 4 = 电机 1CN3:引脚 1 = 3.3V,引脚 2 = GND,引脚 3 = TX,引脚 4 = RX,引脚 5 = GPIO0,引脚 6 = 使能(编程连接器)CN4:引脚 1 和 2 = 电机 2,引脚 3 和 4 = 电机 2J1:跳线闭合(拉低)= 启用,可使用 ESP32 引脚控制 GPIO16 引脚高 = 禁用电机 1J1:跳线闭合(拉低)= 启用,可使用 ESP32 引脚控制 GPIO18 引脚高 = 禁用电机 2D1:电源指示灯U4:3.3V 稳压器,通过电机电源 8V 至 24V 向 ESP32 处理器提供 3.3V 输入U2:H 桥电机驱动器,电机 1U3:H 桥电机驱动器,电机 2
ESP32 引脚与 H 桥 U2 和 U3 引脚 GPIO23/D23-PWM = U2 PWM,电机 1GPIO22/D22-PWM = U3 PWM,电机 2GPIO19/D19-DR = U2 方向控制高或低,电机 1GPIO17/D17-DR = U3 方向控制高或低,电机 2GPIO16/D16 = Motor2 启用/禁用(焊接跳线 J1 = 启用),脱焊跳线 J1 用于 ESP32 启用/禁用控制GPIO18/D18 = Motor1 启用/禁用(焊接跳线 J2 = 启用),脱焊跳线 J1 用于 ESP32 启用/禁用控制
特征
电源 8V 至 24V 直流电机负载高达 2.5A,每个电机峰值 6Amps过流关断阈值 8AmpsH 桥无散热器PWM 频率高达 20Khz(经测试),ESP32 默认输出 500Hz主板电源 LED通过锁存行为过热关断,H 桥通过锁存行为短路关断,H 桥斩波器电流限制,H 桥VDD 欠压关断4 x 3 毫米安装孔PCB 尺寸 48.90 x 41.28 毫米
连接
CN1:引脚 1 VDD 8V 至 24V,引脚 2 = GNDCN2:引脚 1 和 2 = 电机 1,引脚 3 和 4 = 电机 1CN3:引脚 1 = 3.3V,引脚 2 = GND,引脚 3 = TX,引脚 4 = RX,引脚 5 = GPIO0,引脚 6 = 使能(编程连接器)CN4:引脚 1 和 2 = 电机 2,引脚 3 和 4 = 电机 2J1:跳线闭合(拉低)= 启用,可使用 ESP32 引脚控制 GPIO16 引脚高 = 禁用电机 1J1:跳线闭合(拉低)= 启用,可使用 ESP32 引脚控制 GPIO18 引脚高 = 禁用电机 2D1:电源指示灯U4:3.3V 稳压器,通过电机电源 8V 至 24V 向 ESP32 处理器提供 3.3V 输入U2:H 桥电机驱动器,电机 1U3:H 桥电机驱动器,电机 2
ESP32 引脚与 H 桥 U2 和 U3 引脚 GPIO23/D23-PWM = U2 PWM,电机 1GPIO22/D22-PWM = U3 PWM,电机 2GPIO19/D19-DR = U2 方向控制高或低,电机 1GPIO17/D17-DR = U3 方向控制高或低,电机 2GPIO16/D16 = Motor2 启用/禁用(焊接跳线 J1 = 启用),脱焊跳线 J1 用于 ESP32 启用/禁用控制GPIO18/D18 = Motor1 启用/禁用(焊接跳线 J2 = 启用),脱焊跳线 J1 用于 ESP32 启用/禁用控制
0次
版权与免责声明
凡本网注明“出处:维库电子市场网”的所有作品,版权均属于维库电子市场网,转载请必须注明维库电子市场网,https://www.dzsc.com,违反者本网将追究相关法律责任。
本网转载并注明自其它出处的作品,目的在于传递更多信息,并不代表本网赞同其观点或证实其内容的真实性,不承担此类作品侵权行为的直接责任及连带责任。其他媒体、网站或个人从本网转载时,必须保留本网注明的作品出处,并自负版权等法律责任。
如涉及作品内容、版权等问题,请在作品发表之日起一周内与本网联系,否则视为放弃相关权利。
电路图分类
广告

热门电路图
最新电路图


