





手动探针测试台的自动化设计
出处:zfs 发布于:2011-02-11 14:29:37
摘 要: 介绍了一种对ST-103A 型手动探针测试台进行自动化改造的设计方案。在原设备的基础上, 引进步进电机代替原来的手轮控制;其次, 还引进了摄像头和视频采集卡技术实现对探针台的实时监控;另外, 通过VC + + 编写上位机友好界面既提高了控制, 又使得控制更为方便。经测试, 改造后的探针测试台能实现高的全自动化控制。
ST-103A型手动探针测试台是一种半导体制作工艺的中间测试设备, 是中国电子科技集团公司第四十五研究所研制生产的。主要由工作台、显微镜、测试探头、打点器和电源等组成。工作台是探针台的主体, 由承片台、台板和X、Y、Z移动平台等部分组成。
但是由于ST-103A 型测试台是手动控制的, 给测量带来了很多不便, 控制起来也不, 尤其在测量多点的时候, 会带来很大的误差。而且每次测完都要手动记录数据, 使得测量过程非常麻烦。鉴于以上原因, 对ST-103A 型手动探针测试台进行了改造, 实现了其全自动化控制。给半导体材料的测试带来了极大的帮助。
1 总体框架
ST-103A型手动探针测试台为接触式测试探针台, 即在探针接触样品时才能测量, 然而在移动时探针是不能接触样品的。该系统采用单片机控制步进电机的转动 来带动丝杆和滚珠的转动, 从而实现探针台的自动化控制。测试台上的显微镜对探针台进行放大, 然后经过摄像头和视频采集卡对放大后的探针台视频信息进行图像采集, 采集到的图像信息再送到上位机VC + + 界面显示。从而实现了对探针台的实时监控, 并且根据当前的视频图像就可以做相应的控制。总体控制框架图如图1所示。
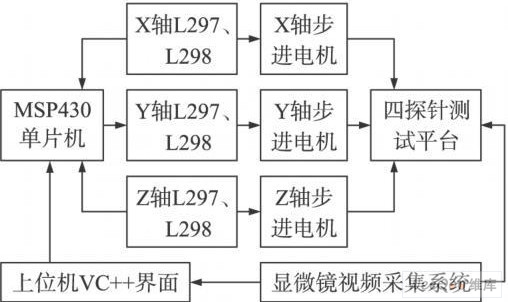
图1 总体控制框架图
2 测试台控制
根据ST-103A型手动探针测试台的结构, 要实现测试台的自动化控制, 首先要对X、Y、Z移动平台进行机械改造, 采用步进电机代替原来的手轮。X、Y 移动平台的传动和导向均采用丝杆与直线导轨结构, Z轴方向采用滚珠与直线导轨结构, 两者都具有导向高、灵敏度高、稳定性好, 对温度变化的敏感性小等特点。但是步进电机与导轨是不能直接连接的。为了实现更好的机械耦合, 带来更好的实验效果, 系统中使用了柔性连轴器作为电机与导轨的中间纽带。再加工相应的机械零件将电机固定于测试台上。
采用MSP430F449单片机作为下位机的主控芯片, MSP430 系列单片机具有与众不同的功能和特点, 超低功耗设计可以提高电源的效率, 节省电能, 众多的片内外围设备可以减少成本的投入, 方便的开发平台和Flash型现场更新功能可以有效加速产品的开发进程。
单片机先通过串口接收上位机界面的命令信息, 再根据相应的命令通过相应的算法之后控制三个电机的转与否, 正转或者反转, 以及转动的步数和速度。因为ST-103A型手动探针测试台是接触式测试探针台, 所以在测量时先对X、Y 轴电机进行控制, 移动到测量位置之后再对Z 轴电机进行控制。
具体控制流程图如图2所示。
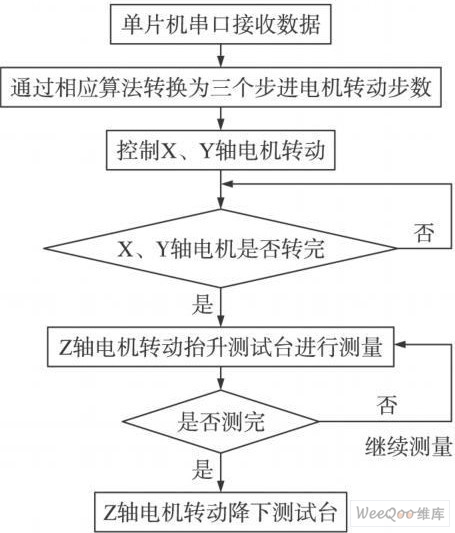
图2 下位机的控制流程图
对于电机的驱动, 该系统采用传统的L297和L298芯片组和作为驱动。基于X、Y、Z轴三维控制, 因此三套L297和L298芯片。L297的是脉冲分配器。它产生三种相序, 对应三种不同的工作方式, 即半步方式(HALFSTEP); 基本步距( FULLSTEP, 整步)一相激励方式; 基本步距两相激励方式。L298芯片是一种高压、大电流双全桥式驱动器, 其设计是为接受标准TTL逻辑电平信号和驱动电感负载的。为了控制更加,系统采用L297的半步方式, 这样电机转完一整圈需要400步, 即需要给L297输入400个脉冲。
3 视频采集系统
视频采集系统的功能是把显微镜里放大的测试台图像信息采集下来并传输到上位机VC+ + 界面,从而实现对测试台的实时监控。该系统采用CCD摄像头与视频采集卡相结合的方式实现视频采集。摄像头固定在显微镜目镜的位置, 即取代目镜。视频卡装置在上位机主机一个空置的PC I插槽内。再用一根视频信号传输线将摄像头的输出口和视频卡的视频输入口连接起来。
CCD 摄像头选用柯士公司生产的CAM-640C型摄像头。视频采集卡则是选用图码公司开发的天敏SDK 2000高清图像采集卡。SDK-2000是一款高品质PC I视频卡, 支持两路复合视频输入和一路SV ideo 输入。其工作原理图如图3所示。
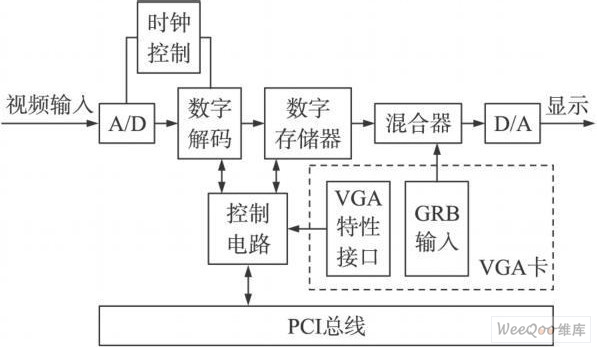
图3 SDK 2000视频卡的工作原理图
如图3, SDK 2000卡主要由视频信号输入端、A /D转换器、同步锁相及时序电路、数据存储器、混合器、D /A转换器和总线控制电路组成。视频信号先进行A /D转换, 然后送入数字解码器解码, 时钟控制则完成时序同步和同步锁相功能; 解码后的信号和VGA 卡的颜色查找表对应的R、G、B输入值混合, 通过D /A转换输出显示。控制电路主要完成解码器、数据存储器保持与VGA 特性一致, 并负责PC I总线控制。
4 上位机软件设计
该设计中上位机软件的开发在VC + + 6. 0平台下完成, 主要分2部分: 视频显示部分和串口传输部分。视频显示部分主要使用了一个动态链接库: 视频采集卡二次开发包DSStream. DLL。DSStream. DLL由视频采集卡自带, 其中包含了很多与视频采集卡相关的操作函数。通过调用库函数可以实现图像的数字化, 要加载DSStream. DLL需要执行以下几个步骤:
( 1)安装SDK 2000软件包;( 2)将SDK 安装目录下的Inc和L ib 目录路径分别加入VC + + 工程设置的“C /C + + -PreprocressorAdd it ional include directories ”和“Link-Inpu t-Addit iona l library path ”中;( 3)将L ib \DSStream. lib文件加入工程设置的 L ink G enera l Object/ library module 中;( 4)将Inc \DSStream. h文件加入工程, 并# inc lude “ DSStream. h”;( 5)将Exe \DSStream. dll文件拷入系统目录或其他系统能找到的目录中。
串口传输部分则是使用了Remon Spekre ijse提供的串口类! C serialPo rt类。CserialPort类主要包括了串口初始化、启动串口通信监测线程、暂停或停止监测线程、关闭串口、发送字符或数据等函数。
要使用CserialPort类需要先执行以下两个步骤:
( 1)将Ser ia lPor.t cpp文件和Seria lPor.t h 文件拷贝到工程文件夹;( 2)将Ser ia lPor.t cpp文件和Seria lPor.t h 文件加入到工程并# include “SerialPo r.t h”。
当打开VC+ +界面时, 界面上会显示测试台当前的图像, 如图4所示。以图像的中心点作为原点, 将鼠标在需要测量的目标点处双击, 通过OnLButtonDblC lk( )函数和SetCapture( )函数获取目标点的坐标值, 再将此坐标值与原点比较, 所得的差值再通过串口传输给单片机。单片机则会根据此差值控制测试台做相应的移动, 将目标点移动到原点的位置, 此时目标点就成了新的原点。控制原理图如图5所示。

图4 视频采集效果图
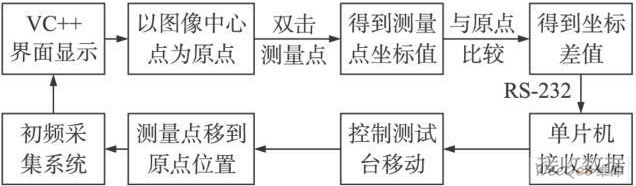
图5 测试台的控制原理图
5 改造后的技术指标
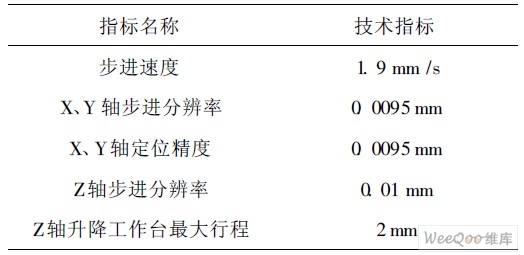
通过控制步进电机来实现测试台的自动控制,跟原来的手动探针测试台相比, 许多性能都有了很大的提高。包括定位、升降控制的以及步进速率等等。表1列出了改造后测试台的一些技术指标。
表1 测试台改造后的技术指标
6 结束语
探针测试台是半导体集成电路测试的重要设备, 它的自动化控制以及控制的精准度对半导体测试都是非常重要的。改造完成后的探针测试台经过测试, 成功地完成了对测试台的全自动控制, 实现了实时监控, 根据表1可以看出, 控制高。由于还采用了VC+ +编写上位机界面控制, 使得改造后的探针测试台还具有界面友好、操作简单等优点。
`下一篇:中央空调系统节能改造
版权与免责声明
凡本网注明“出处:维库电子市场网”的所有作品,版权均属于维库电子市场网,转载请必须注明维库电子市场网,https://www.dzsc.com,违反者本网将追究相关法律责任。
本网转载并注明自其它出处的作品,目的在于传递更多信息,并不代表本网赞同其观点或证实其内容的真实性,不承担此类作品侵权行为的直接责任及连带责任。其他媒体、网站或个人从本网转载时,必须保留本网注明的作品出处,并自负版权等法律责任。
如涉及作品内容、版权等问题,请在作品发表之日起一周内与本网联系,否则视为放弃相关权利。
- 单相异步电动机是什么?具有什么特征?2025/8/8 16:42:39
- IGBT 短路振荡机制的深度解析2025/8/8 16:16:56
- 工业充电器隔离式 DC - DC 功率级拓扑结构选型全解析2025/8/7 16:40:14
- 电机控制中位置传感器的选择与应用解析2025/8/7 16:33:17
- 单相电机正反转原理是什么?2025/8/6 11:26:48



