





基于DSP的机载光电稳瞄稳定环路数字控制实现方法
出处:仪器仪表学报 发布于:2011-06-11 11:59:17
1 引言
机载光电稳瞄产品大量装备于各种类型飞机上,其是陀螺稳定平台,主要作用在于隔离载体的角扰动,使安装在载体上的光学传感器的视轴在惯性空间内保持稳定,使光学传感器得到清晰的图像。机载光电稳瞄稳定控制算法除了经典控制还有各种先进的控制算法,如:控制、变结构控制、神经网络及模糊控制等。从目前的文献资料来看,这些先进的算法大都限于仿真研究,实际用于产品的报道很少。目前,机载光电稳瞄产品以经典控制模拟电路实现为主。
模拟控制的实现依赖于集成电路和分离元件,设备间的信号传递均采用模拟量,导致控制器元件众多、结构复杂、体积庞大,同时在模拟电路的硬件基础上,要想实现各种复杂的现代控制方法几乎是不可能的。数字控制系统以程序代替硬件,有利于减小电路的体积,降低成本,在信号处理、算法实现上具有模拟控制无可替代的优势。数字控制是整个伺服控制领域的发展趋势。随着科学技术的发展,对机载光电稳瞄的稳定、动态品质的要求越来越高。因此,必须采用先进的数字控制技术,运用现代控制算法,设计出高性能的陀螺稳定平台控制系统,以满足实际系统的要求。
2 机载光电稳瞄系统工作原理
系统的控制环路如图1所示,系统包含三个环路,内部为电流环,电流环控制流过电枢的电流尽可能严格跟随电流指令,改善电流跟随电压的动态特性,包括超调和调节时间等,抑制电子噪声和反电势等的影响。中间为速度环,即稳定环。稳定环是光电稳瞄系统的关键,光电探测器的机(船、车)载应用直接受伺服系统稳定环性能的影响[2]。稳定环采用速率陀螺作为惯性敏感元件,检测光电稳定平台方位和俯仰轴角速度,与速度命令信号形成误差电压,该误差电压通过稳定控制器在直流电机轴上产生稳定力矩,从而实现光电稳定平台抑制扰动、保持在惯性空间相对稳定。外部为位置环,通过比较输入信号与反馈信号产生控制偏差,借助位置控制器校正补偿输出到稳定环对光电稳瞄实施控制。在目前的稳瞄产品中,三个环路的控制器除了位置环控制器为数字控制器,稳定环控制器和电流环控制器均为模拟控制器。本文研究的目的是将稳定环用数字控制方式实现。
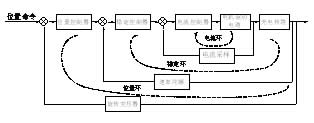
图1 光电稳定平台控制系统环路
3 控制系统建模与设计
建立数学模型
从前面的分析可知,稳定环路控制的对象为包括稳瞄转塔的电流闭环,对电流闭环分析如下:
PWM驱动模型如图2所示。本系统中采用的是双极性四桥式PWM驱动,其传递函数可以写为:
![]() (1)
(1)

图2 PWM驱动模型
当PWM开关频率较高,并且系统的截止频率时,上式可以简化为:
![]() (2)
(2)
其中kPMW= 电源电压/三角波电压;T为PWM开关周期。
一般来说T非常小,可以忽略延迟环节。
电机模型
电机选用的是永磁直流力矩电机,系统采用的是电压调速。由此可以得到电机的模型:
![]()
![]()
![]()
![]() (3)
(3)
其中R为电机绕组电阻,L为电机绕组电感,U2表示调制电压输入,I表示流过电机绕组的电流,E为电机绕组反电势,J为负载转动惯量,M为电机输出力矩,ω为电机转速(即负载转速),Ce和Cm分别为电机的反电势常数和力矩常数。
这样可以得到整个电流环闭环结构形式如图3所示,图中Md为干扰力矩。
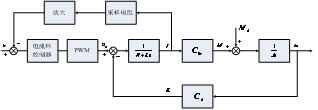
图3 电流环反馈框图
根据实际电路计算,得到电流环控制器为:
 ,其中
,其中![]() (4)
(4)
3.1 控制器设计
光电稳瞄一般为两轴或三轴陀螺稳定平台,各个轴从控制系统的构成来讲,具有相似结构。两轴平台包括方位轴和俯仰轴,这里以方位轴为例进行控制器设计。
光电稳瞄系统所用陀螺为速率陀螺,从陀螺的资料手册上查得的陀螺数学模型[3]为:
![]() (5)
(5)
式中:kg=10,ω=100Hz,ξ=0.707。
根据前面的分析建立经典控制系统Simulink仿真模型如图4所示。
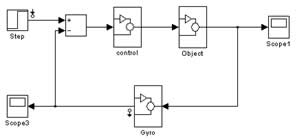
图4 经典控制系统Simulink仿真模型
利用Simulink中的线性化工具将对象线性化,其结果作为sisotool控制器设计的基础,从sisotool工具箱中设计控制器:
![]() (6)
(6)
设计后系统根轨迹和开环频率特性结果如图5所示。
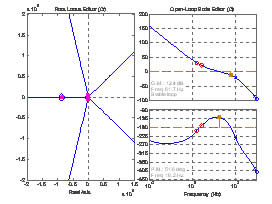
图5 sisotool工具箱设计的控制器
从图中可以看出系统幅值裕度为12.4dB,相角裕度为51.6o。
3.2 控制系统仿真
将设计的控制器加入系统Simulink仿真模型得到系统阶跃响应结果如图6所示,频率特性如图7所示。
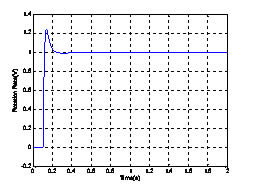
图6阶跃响应仿真结果
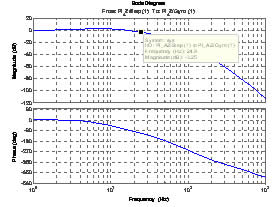
图7 仿真频率特性
从图6中可以看出,超调量为24.4%,调节时间约为115ms。从图7仿真频率特性可以看出,系统的带宽约为25Hz。
4 数字控制硬件平台
数字控制硬件结构如图8所示。系统包括DSP芯片、A/D电路、D/A电路和信号调理电路。硬件平台器件是TMS320F2812数字信号处理芯片。TMS320F2812的运行频率可达150MHz,片上存储器多达128K×16位的Flash存储器,多达128K×16位的ROM,1K×16位的OPT ROM,两块4K×16位的单周期访问RAM,一块8K×16位的单周期访问RAM,两块1K×16位的单周期访问RAM[4]。由于TMS320F2812片内RAM资源有限,系统中外扩了一片512K的RAM芯片。
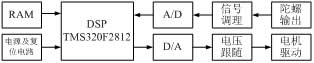
图8 数字控制硬件结构框图
陀螺输出的电压经信号调理电路后进入A/D芯片,TMS320F2812从A/D芯片读入转换的电压数据,经算法计算后,DSP芯片将输出的值送入D/A芯片输出电压,输出的电压经电压跟随提高驱动能力后进入电机驱动电路,由力矩电机驱动陀螺稳定平台。
A/D转换芯片采用AnalogDevices公司的16位6通道模数转换芯片AD7656。此芯片输入电压范围为-10V~+10V。
陀螺输出信号要经过远距离传输,为了降低陀螺信号的噪声,稳瞄系统中采用差分形式传输陀螺输出信号。本设计中模数转换芯片AD7656为单端输入方式,因此需要将陀螺输出的差分信号转换成单端信号。转换电路采用AnalogDevices公司的AD620仪表放大器芯片,该芯片的1脚和8脚之间接的电阻 决定其放大倍数,放大倍数计算公式如下:
 (7)
(7)
由式7可知,当电阻 为无穷大时放大倍数 ,本设计中选择放大倍数为1。
D/A转换芯片采用AnalogDevices公司的12位4通道数模转换芯片DAC8412,输出电压范围为-10V~+10V,输出的通道由DSP的地址低两位A1和A0选择。DAC8412芯片的±10V输入参考电压由AD688芯片产生。
5 试验与分析
a) 通道测试
1) A/D电路测试
用标准电压源测试A/D电路的采样,测试结果如图9所示。图中横轴为输入到A/D电路的标准电压源电压值,纵轴为AD7656芯片转换出的数据,图中黑点为实际测试的数据点,直线为理想状态下的A/D电路采样曲线。
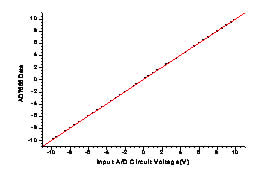
图9 A/D电路测试结果
可以看出,测试的数据点基本上位于理想A/D电路采样曲线上,为此算法中不需要对A/D电路采样的数据进行补偿。
2) D/A电路测试
通过输出标定值来标定D/A电路的输出,测试结果如图10所示。图中横轴为DAC8412要输出的标定电压值数据,纵轴为D/A电路实际输出的电压值,图中黑点为实际测试的数据点,直线为理想状态下的D/A电路输出曲线。
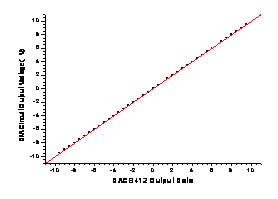
图10 D/A电路测试结果
可以看出,测试的数据点基本上位于理想D/A电路输出曲线上,为此算法中不需要对D/A电路输出的电压值进行补偿。
b) 伺服周期的设定
采样周期是数字控制系统的一个非常重要的指标,高性能伺服控制系统一般采样率不小于1KHz,为此要测量算法运行所需的时间,确保其在伺服周期内完成。
利用DSP的IO口,在算法运行之前置IO口为低电平,算法运行之后置IO口为高电平,从示波器测量出低电平的时间即为算法运行所需时间,测试结果如图11所示。可以看出算法运行所需时间为55 ,满足一般高数字控制系统的控制频率为1kHz要求。本设计中设定采样周期1ms。
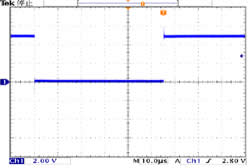
图11 算法运行所需时间测试结果
c) 控制系统动态测试
1) 阶跃响应
为系统加入阶跃信号,用示波器测量得到阶跃响应曲线如图12所示。图中上方的曲线为给定阶跃信号曲线,下方的曲线为系统的响应曲线。可以看出,上升时间约为20ms,峰值时间约为40ms,调节时间约为100ms,超调量约为37%。

图12 系统阶跃响应曲线
2) 系统频率特性
经扫频得到系统的闭环特性曲线如图13所示。从图13可以看出,系统带宽约为17Hz。

图13 系统的闭环特性曲线
6 结论
稳定环路是光电稳瞄系统的关键,影响到光电稳瞄的稳定性能。论文设计的控制器可以满足光电稳瞄的应用需求,搭建的数字控制硬件平台为在机载光电稳瞄控制中实现复杂的算法建立了实现平台。从仿真和试验的结果可以看出,数字控制实现机载光电稳瞄稳定控制设计简单且可靠,系统稳定性能和动态品质较好。数字控制在机载光电稳瞄稳定环路控制中得到了成功应用,系统稳定控制器的设计和调试变得简单、灵活、高效。论文也为其它复杂算法在机载光电稳瞄中应用打下了基础。
参考文献:
[1]. TMS320F2812 datasheet https://www.dzsc.com/datasheet/TMS320F2812_1116432.html.
[2]. ROM datasheet https://www.dzsc.com/datasheet/ROM_1188413.html.
[3]. AD7656 datasheet https://www.dzsc.com/datasheet/AD7656_1131528.html.
[4]. AD620 datasheet https://www.dzsc.com/datasheet/AD620_122143.html.
[5]. DAC8412 datasheet https://www.dzsc.com/datasheet/DAC8412_253391.html.
[6]. AD688 datasheet https://www.dzsc.com/datasheet/AD688_1055411.html.
版权与免责声明
凡本网注明“出处:维库电子市场网”的所有作品,版权均属于维库电子市场网,转载请必须注明维库电子市场网,https://www.dzsc.com,违反者本网将追究相关法律责任。
本网转载并注明自其它出处的作品,目的在于传递更多信息,并不代表本网赞同其观点或证实其内容的真实性,不承担此类作品侵权行为的直接责任及连带责任。其他媒体、网站或个人从本网转载时,必须保留本网注明的作品出处,并自负版权等法律责任。
如涉及作品内容、版权等问题,请在作品发表之日起一周内与本网联系,否则视为放弃相关权利。
- 模糊逻辑在 DSP 上实时执行2023/7/25 17:13:30
- 多速率DSP及其在数模转换中的应用2023/6/12 15:28:52
- 使用 DSP 加速 CORDIC 算法2023/3/29 15:46:30
- 高速DSP系统的信号完整性2022/9/26 16:45:38
- 自适应噪声消除系统的实现2022/1/17 17:51:17



