





浅谈三轴惯性传感器ADISl6355在姿态检测中的应用
出处:吕 强,刘 峰,王珂珂,王东来 发布于:2011-08-26 11:00:34
引言
四轴飞行器是瑞士科技人员研制成的一种新型飞行器,也是一种娱乐机器人。它利用旋翼来进行空中飞行,用于娱乐,它能弹钢琴曲。四轴飞行器其构造特点是在它的四个角上各装有一旋翼,由电机分别带动,叶片可以正转,也可以反转。为了保持飞行器的稳定飞行,在四轴飞行器上装有3个方向的陀螺仪和3 轴加速度传感器组成惯性导航模块,它还通过电子调控器来保证其快速飞行。
1.惯性测量传感器
传感器是一种能把物理量或化学量转变成便于利用的电信号的器件。国际电工委员会(IEC:International Electrotechnical Committee)的定义为:“传感器是测量系统中的一种前置部件,它将输入变量转换成可供测量的信号”。按照Gopel等的说法是:“传感器是包括承载体和电路连接的敏感元件”,而“传感器系统则是组合有某种信息处理(模拟或数字)能力的系统”。传感器是传感系统的一个组成部分,它是被测量信号输入的道关口。传感器把某种形式的能量转换成另一种形式的能量。有两类:有源的和无源的。有源传感器能将一种能量形式直接转变成另一种,不需要外接的能源或激励源。
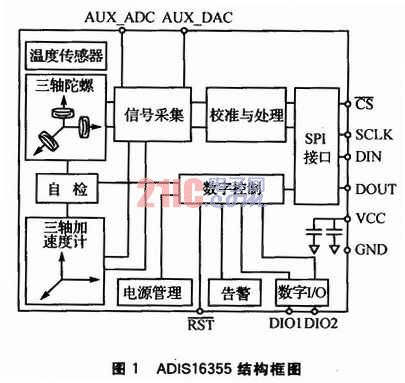
惯性测量传感器是ADI公司推出的一款具有-40~85℃温度范围内校准、SPI接口输出的六自由度惯性测量传感器,出厂前已经对产品的零偏和灵敏度进行了全温校准。ADISl6355的输出零偏稳定性为0.015°/s,温度系数为0.008(°/s)/℃,角度随机游走为4.2°/s,适于要求较高的应用。ADISl6355的结构框图如图1所示。传感器内部完成了信号的采集、校准与滤波处理,具有自检功能,还有1路ADC输入、1路DAC输出和2路数字I/O。SPI接口能够输出3个角速率信号、3个线加速度计信号、3个温度传感器信号和电源电压信号。
2 应用电路设计
公司的32位STM32系列微控制器是专门为微控制系统、工业控制系统和无线网络等对功耗和成本敏感的嵌入式应用领域而设计的。ST-M32F103VB是一款基于ARMv7-M体系结构的32位标准处理器,工作频率高达72 MHz,具有3个通用定时器、1个控制定时器、7个独立的DMA通道、1个USB接口、3个USART接口、2个SPI接口和2个I2C接口。
2.1 ADlSl6355接口电路
与STM32F103VB通过标准SPI接口进行连接,其硬件接口电路如图2所示。ADIS16355的SCLK、DOUT、DIN、CS、RST脚分别与ST-M32F103VB的SPll~SCK、SPll_MISO、SPll_MOSI、SPll_NSS、PB0脚连接。

的SPI接口配置为全双工主模式,每帧传输16位数据,每帧先发送MSB。时钟极性配置为空闲状态时,SCK保持高电平;时钟相位配置为数据采样从第二个时钟边沿开始。通信的波特率配置为64分频,为1.125 MHz。为提高SPI的速度,降低CPU资源的使用率,采用了SPI的DMA模式,SPI接收到的数据直接存储在定义好的数组里。STM32F103VB的SPI接口配置程序如下:

2.2 无线数据传输模块及其接口
无线数据传输是指利用无线传输模块将工业现场设备输出的各种物理量进行远程传输,如果传输的是开关量,也可以做到远程设备遥测遥控。无线数传设备DTD433可以提供高稳定、高可靠、低成本的数据传输。它提供了透明的RS232/RS485接口,具有安装维护方便、绕射能力强、组网结构灵活、大范围覆盖等特点,适合于点多而分散、地理环境复杂等应用场合。该设备提供点对点通信,也可以实现点对多点通信,不需要编写程序,不需要布线。一般电工调试也可以通过。无线数据传输设备广泛应用于无线数传领域,典型应用包括遥控、遥感、遥测系统中的数据采集、检测、报警、过程控制等环节。
无线数据传输模块使用的是nRF2401芯片,它工作于2.4GHz ISM频段,输出功率和通信频道可通过程序进行配置。该模块功耗非常低,以-5 dBm的功率发射时工作电流只有10.5 mA,接收时工作电流只有18 mA。实际使用时其无线传输距离可达30 m,传输速率可达1000 kbps。单片机和无线数据传输模块的连接使用普通的I/O口,其电路设计如图3所示。

2.3 电源模块
电源模块主要为STM32F103VB、ADISl6355和无线数据传输模块供电,其电路设计如图4所示。锂电池提供的11.1 V电源经ASMlll7-5.O转换为5 V,再经过ASMlll7-3.3转换为3.3 V。其中,5 V为ADISl6355提供电源,3.3 V为STM32F103VB和无线数据传输模块提供电源。Dl是用于电源指示的LED,Rl为O.5 A可恢复保险。

3 四轴飞行器姿态估计
四轴飞行器的姿态主要指它在地面坐标系中的3个姿态角,即俯仰角、横滚角和偏航角。其中,俯仰角和横滚角可以通过对陀螺的角速度积分得到,也可通过3个轴向的加速度推算出来,但偏航角只能对角速度积分得到。由于在四轴飞行器测试平台上检测姿态,对偏航角先不做要求。四轴飞行器的姿态控制系统模型中3个轴向的加速度可表示为:

其中,u、v、w为机体坐标系下3个轴向的线速度,p、q、r为机体坐标系下绕3个轴的角速度,θ、φ为四轴飞行器的俯仰角和横滚角,U1为总的升力,m为飞行器的质量。在试验平台上检测时,四轴飞行器的位置固定不变,上式可简写成:
![]()
其中,为加速度计测得的加速度,通过式(2)可推算得到俯仰角和横滚角如下:
![]()
配置陀螺的测量范围为±300°/s,1 min内测得的ADISl6355三个轴的角速度、加速度和温度曲线如图5所示。在约19 s时使飞行器绕x轴进行滚转运动,在约45 s时使飞行器恢复到刚开始的静止状态。由图5可知,静止时角速度的输出范围为±2°/s,x、y轴加速度计的输出范围为±O.015 g,温度由26℃到30℃逐步上升。

对角速度进行积分得到飞行器的三个姿态角,如图6所示。通过式(3)由加速度信息推算的两个角度如图7所示。对比图6和图7可知,由角速度积分得到的角度终不是静止时的0°。原因是陀螺存在漂移,随着时间的积累,测量的误差会在积分中一直累加,而由加速度信息推算出来的角度就不存在漂移。图7中约第24 s时,y轴角度出现一个峰值(高达70°),而实际的旋转角度只在±30°之间,其原因是振动引起加速度值突增,导致推算出的角度过大。


结语
实际使用中,加速度计对振动非常敏感,应根据应用的场合对加速度数据进行处理。四轴飞行器具有4个无刷电机,实际飞行时电机引起的振动非常大,如果简单地通过加速度来推算角度就会出现很多图7中第24 s的尖点,与实际情况不符合。
本文使用STM32F103VB单片机对惯性测量传感器ADISl6355进行数据采集,并通过无线数据传输模块把数据发送回计算机。利用ADISl6355对四轴飞行器姿态进行检测,可分别利用角速度信息和加速度信息对飞行器姿态进行估计,两种方法各有优缺点,在实际使用时要综合进行考虑。
版权与免责声明
凡本网注明“出处:维库电子市场网”的所有作品,版权均属于维库电子市场网,转载请必须注明维库电子市场网,https://www.dzsc.com,违反者本网将追究相关法律责任。
本网转载并注明自其它出处的作品,目的在于传递更多信息,并不代表本网赞同其观点或证实其内容的真实性,不承担此类作品侵权行为的直接责任及连带责任。其他媒体、网站或个人从本网转载时,必须保留本网注明的作品出处,并自负版权等法律责任。
如涉及作品内容、版权等问题,请在作品发表之日起一周内与本网联系,否则视为放弃相关权利。
- ADI 即插即用型 D 类放大器的卓越特性与优势2025/8/8 16:36:07
- 深入解析共集、共基、共射放大器的奥秘2025/8/2 10:49:20
- 线性霍尔 IC 全解析:原理、应用与优势2025/7/25 16:16:43
- 模拟音频耳机和数字音频耳机的区别2025/7/17 17:19:59
- ATA-7020 高压放大器:铁电畴反转研究的关键利器2025/7/11 16:22:16



