





基于Simulink库仿真的单相逆变电源调节器设计
出处:liudewei 发布于:2012-06-27 09:36:36
摘要:基于Simulink库研究了采用SPWM波控制的单相逆变器双闭环PID调节器的建模与仿真。本系统在Simulink库中模拟产生SPWM波形,并建立了在理想状态下的整流和逆变电路,提出通过电压均值环和电压瞬时环双环控制来对输出电压进行调节。将此建模思想移植到10K模块化单相UPS电源上,控制和准度,均能达到预期效果。
随着电力行业的快速发展,逆变器的应用越来越广泛,逆变器的好坏会直接影响整个系统的逆变性能和带载能力。逆变器的控制目标是提高逆变器输出电压的稳态和动态性能,稳态性能主要是指输出电压的稳态和提高带不平衡负载的能力;动态性能主要是指输出电压的THD(Total Hannonic Distortion)和负载突变时的动态响应水平。在这些指标中对输出电压的THD要求比较高,对于三相逆变器,一般要求阻性负载满载时THD小于2%,非线性满载(整流性负载)的THD小于5%.这些指标与逆变器的控制策略息息相关。文中主要介绍如何建立电压双环SPWM逆变器的数学模型,并采用电压有效值外环和电压瞬时值内环进行控制。针对UPS单模块10 kVA单相电压型SPWM逆变器进行建模仿真。通过仿真,验证了控制思路的正确性以及存该控制策略下的逆变器所具有的鲁棒性强,动态响应快,THD低等优点。并以仿真为先导,将其思想移植到具体开发中,达到预期效果。
1 三电平逆变器单相控制模型的建立
带LC滤波器的单相逆变器的主电路结构如图1所示。图1中L为输出滤波电感,C为滤波电容,T1,T2,T3,T4分别是用来驱动IGBT的三电平的SPWM波,U0为输出负载两端的电压。在建立控制系统的仿真模型时,需要采集负载两端的电压与实际要求的电乐值做比较,然后通过调节器可以得到所需要调节的值。在此仿真模型中,驱动波形采用的是三电平的SPWM波形,具体的产生原理在这不做详细描述。在Matlah的Simlink库中SPWM波的产生如图2所示,这里调制比设为0.8.
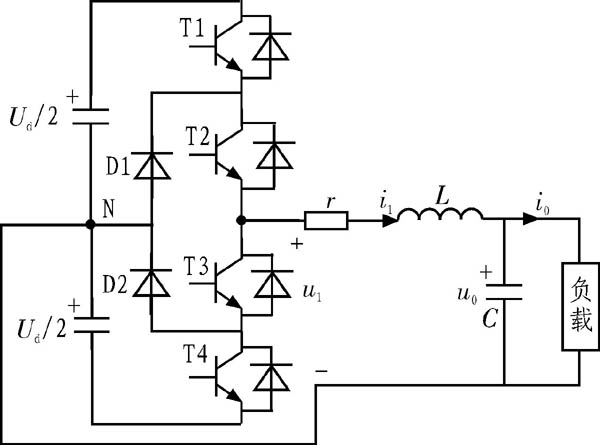
图1 三电平逆变器单相主电路

图2 四相SPWM产生电路
在B1,B2,B3,B4端口用模拟示波器观察其波形,结果如图3所示。
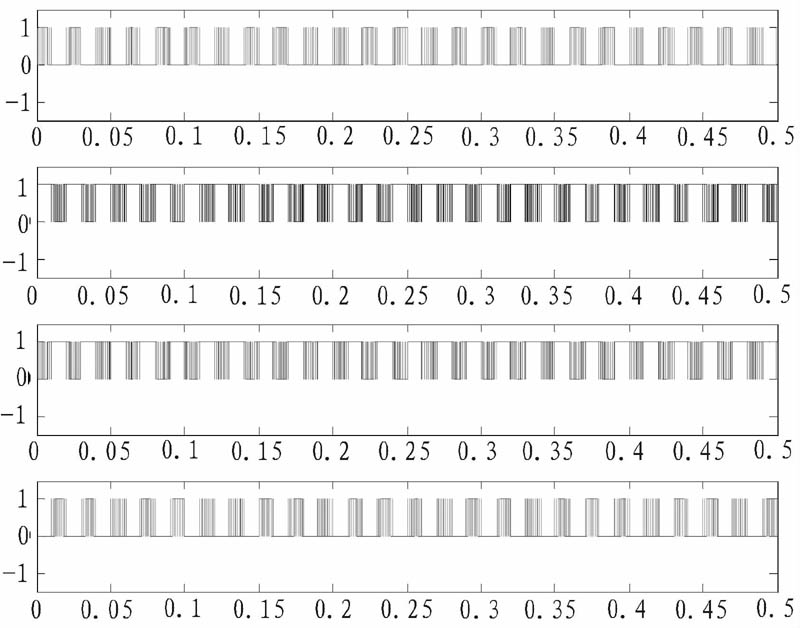
图3 四相SPWM驱动波形
2 双环控制的选取
在逆变控制系统中,采用输出电压有效值反馈的方法进行控制,这种方法通过将输出电压有效值与实际所要求的电压有效值进行比较,误差信号与正弦信号相乘的结果作为SPWM的调制信号。这种方法的输出波形稳压较高,稳定性好,但的缺陷在于逆变器的动态响应很差,完全依靠逆变器的自然特性,输出电压的波形质量无法控制。当负载为非线性负载时,由于逆变器输出阻抗的影响,输出电压波形的THD比较大。为解决以上的缺陷,引入内环电压瞬时环,当负载发生变化时,采样回来的输出电压会在电压瞬时环的控制下,保持良好的动态响应,控制框图如图4所示。
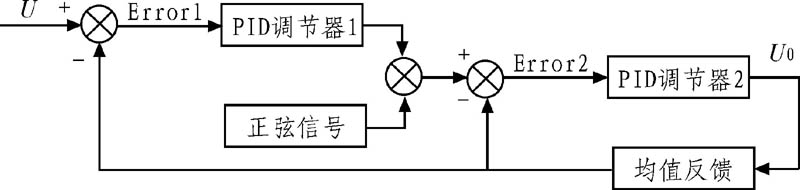
图4 双环控制框图
在图4中,输入信号U为系统所要求的信号,U为系统输出信号。本系统将PID调节器1设置为电压瞬时值内环,将PID调节器2设置为电压均值外环。
3 建立仿真模型
在Simulink下构建三电平逆变器的仿真模型,该模型主要由三电平的SPWM产生电路,主拓扑电路,控制电路和负载电路4部分组成。控制电路实现了电压双环控制,同时为SPWM脉冲提供调制信号,负载可以选择阻性载或整流载。
3.1 建立主拓扑电路
首先来建立逆变器的主拓扑电路。根据图1所示的电路原理,在Matlab环境下新建一个上程,然后存Simulink库根据需要找出二极管和IGBT,连接电路图便可得到如图5所示的单相逆变器的主拓扑仿真模型。
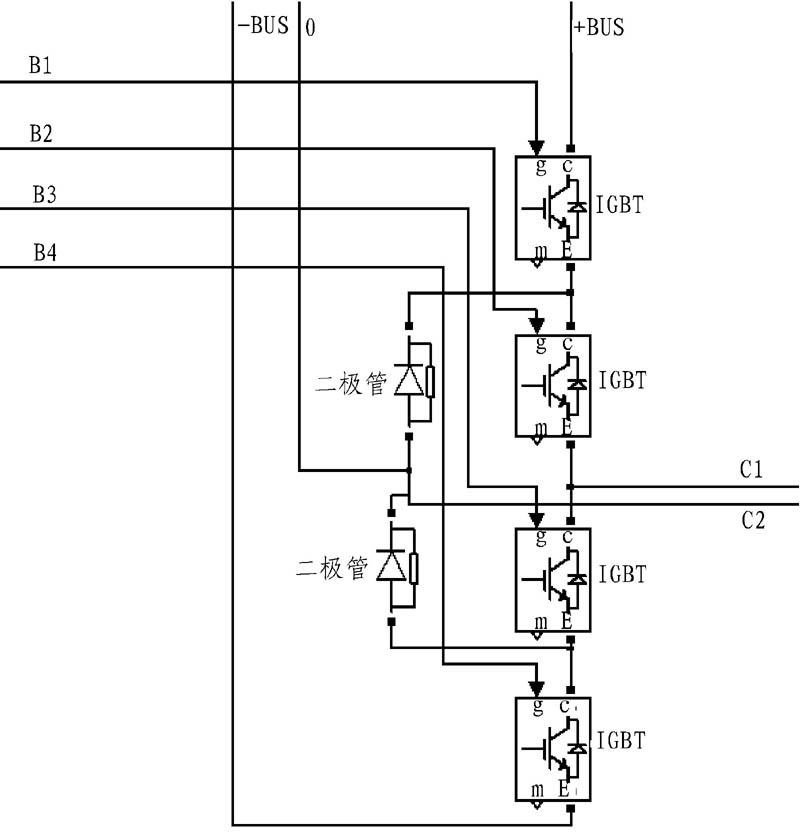
图5 单相逆变器主拓扑结构图
其中,B1、B2、B3、B4分别代表四相SPWM波形驱动波形,+BUS、0分别表示图1中的Ud/2和N,C1和C2之间的电压即位图1中的U1.
3.2 负载电路建模
负载分为阻性载和整流载,为了更好的验证PID调节器的性能,在此假定整流载和阻性载同时存在,然后中间用开关来控制所带的负载特性。负载建模如图6所示。
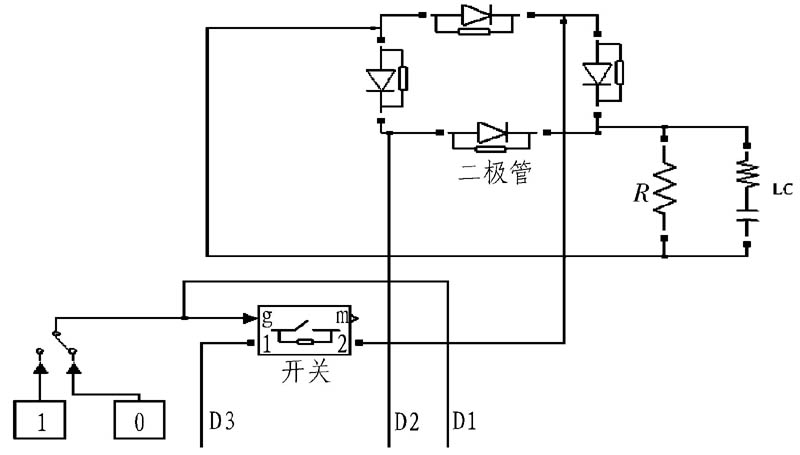
图6 负载(阻性载和整流载可选)
当手动开关位于1时,负载特性为整流载。反之,当手动开关位于0时,负载特性为阻性载。图6中,D1为开关信号,D2、D3为连接到输出端的连接端口。
3.3 闭环控制电路以及输出电路建模
闭环控制电路的模型如图7所示。图7中;模拟示波器1中的1端口为输出端C1和C2未经过电容滤波而得到的输出电压,2端口为输出端C1和C2经过电容滤波后得到的输出电压,3端口为输出电压经过一个增益器之后所得到的对应的输出电压,4端口为系统输出电流,5端口为控制负载特性选择的开关信号。仿真波形如图8所示。
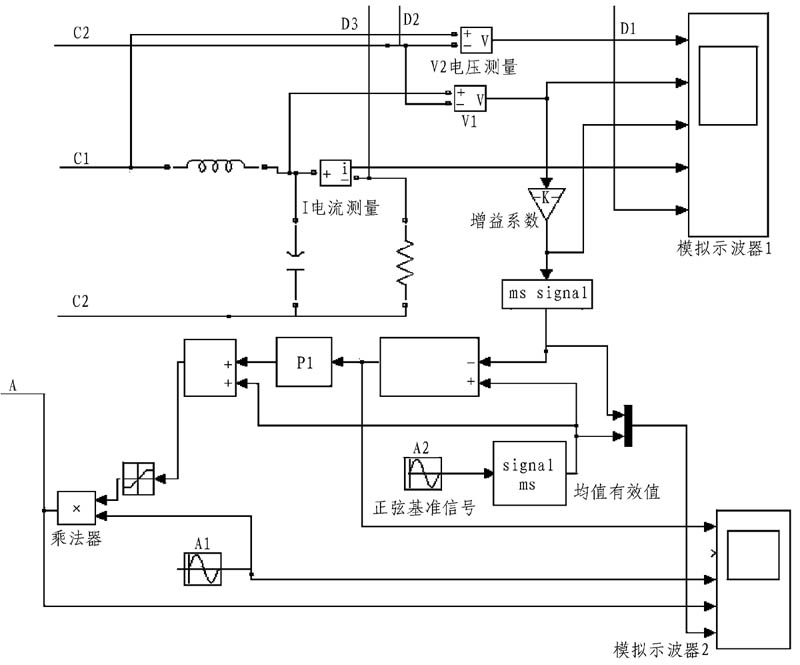
图7 闭环控制电路
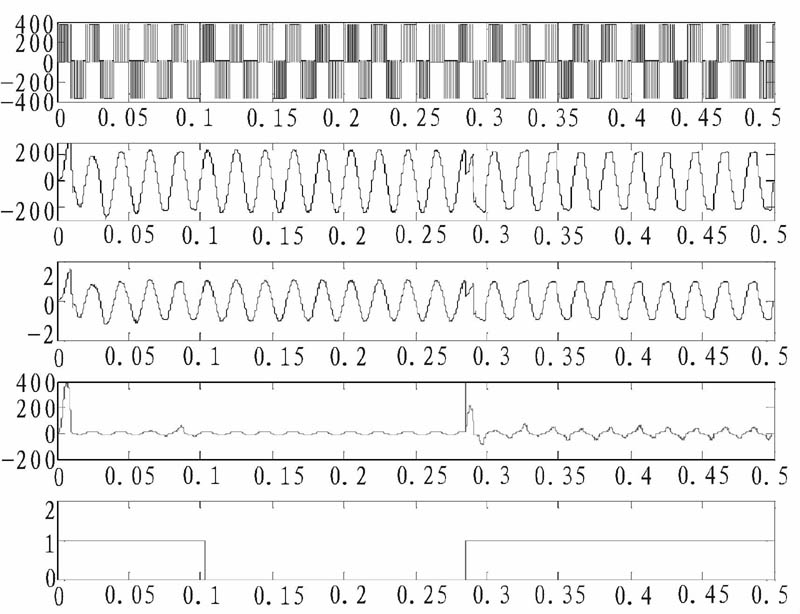
图8 输出端口电压仿真波形
根据图4提出的控制策略,输出电压经过一个均值器之后与系统所要求得到的信号进行比较,比较后的差值经过PID调节(电压瞬时内环调节),同理,可以建立电压均值外环控制模型。
在上述模拟示波器2中,1端口为次PID调节器之前的差值Errorl,仿真波形如图9所示。
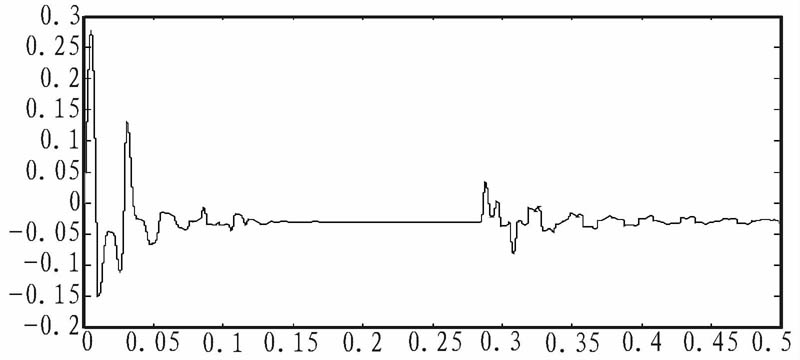
图9 经过PID调节器之前的差值信息波形
通过图8,可以很明显的看到,当负载特性发生变化时,电流波形和输出电压波形会发生明显的变化。当负载为阻性载时,输出电压电流均为正弦信号。当负载为整流载时,输出电压电流信号出现一定的失真。
如图9所示,在开始进入调节器时,输出电压与实际要求的电压差值很大,但在闭环中,经过PID的多次调节之后,可以很清楚的看到两者之间的差值稳定趋近于0.从开始到趋近于0的整个动态过程反应了PID调节器的调节快慢,稳定等参数,从上图可以清楚的看出此调节器的鲁棒性强,动态响应快。
4 将建模思想移植到实际电路中
建模的目的主要是为了验证设计的方案是否可行,如果可行,便可以设计硬件电路来实现此方案,可以花少的代价来完成控制器的设计。
硬件平台:DSP2812+10K高频UPS模块
根据实际经验修改PID的参数,使输出能够在快稳的情况下达到预定值。
通过实际的调试,瞬时环中:P=0.6,I=0.04,均值环中,P=0.3,I=0.072,D=0.001.此时系统稳定,实际的输出波形如图10所示。
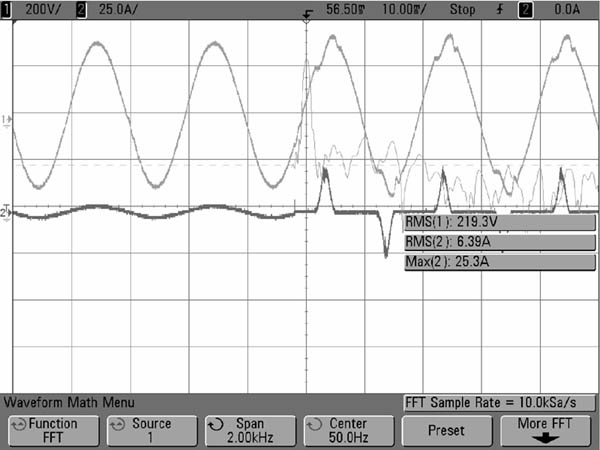
图10 实际电路中输出电压与电流信号
实际要求输出电压为220V,负载采用的是整流载。上图是阻性载往整流载切换时的输出电压与输出电流波形图。
从图中,可以看出,此PID控制器能够快速稳定的将输出电压值稳定在实际所要求的200 V左右,说明了此调节器动态响应快,有交强的鲁棒性。
5 结束语
PID调节器是逆变器中不可或缺的部分,PID调节器的好坏直接影响到逆变器的输出性能和带载能力。文中构建了10 KVA的单相SPWM逆变器的Simulink模型,负载采用纯阻性载和整流载分别进行仿真。仿真结果表明,在不同的负载情况下,该控制器鲁棒性强,动态响应快,输出电压总谐波畸变低。将此建模思想移植到10 K模块化单相UPS电源上,控制和准度,均能达到预期的效果。
上一篇:新颖的大功率测试电源
版权与免责声明
凡本网注明“出处:维库电子市场网”的所有作品,版权均属于维库电子市场网,转载请必须注明维库电子市场网,https://www.dzsc.com,违反者本网将追究相关法律责任。
本网转载并注明自其它出处的作品,目的在于传递更多信息,并不代表本网赞同其观点或证实其内容的真实性,不承担此类作品侵权行为的直接责任及连带责任。其他媒体、网站或个人从本网转载时,必须保留本网注明的作品出处,并自负版权等法律责任。
如涉及作品内容、版权等问题,请在作品发表之日起一周内与本网联系,否则视为放弃相关权利。
- 提高低功率 AC/DC 转换的效率并减小尺寸2024/4/29 17:02:26
- 串联电路与并联电路的区分2024/4/25 17:15:00
- 查找隔离栅极驱动器的峰值电流2024/4/25 17:07:48
- 使用 GaN IC 离线电源的大容量电容器优化2024/4/24 17:30:57
- 并联电压电池2024/4/23 17:45:00



