





汽车 MCU 复位电路设计:关键要素与实用技巧
出处:网络整理 发布于:2026-06-08 17:04:40 | 554 次阅读
11.1 复位电路概述
复位(Reset)是 MCU 最基本也是最重要的功能之一。复位的作用是将 MCU 的所有寄存器恢复到初始状态,程序会从复位向量地址开始执行。可靠的复位电路是确保 ECU 在各种工况下稳定运行的基础。
 图 1 - 1:ARM Cortex - M 复位向量表结构,展示了从初始 SP 值到各异常处理向量的地址映射关系。复位向量位于地址 0x00000004,MCU 上电后 PC 指针自动指向该地址开始取指令。来源:Microcontrollers Lab - Microcontroller Booting Process
图 1 - 1:ARM Cortex - M 复位向量表结构,展示了从初始 SP 值到各异常处理向量的地址映射关系。复位向量位于地址 0x00000004,MCU 上电后 PC 指针自动指向该地址开始取指令。来源:Microcontrollers Lab - Microcontroller Booting Process
汽车 ECU 的复位源通常包括以下几类:
上电复位(POR, Power - On Reset) :电源首次上电时自动产生。
欠压复位(BOR, Brown - Out Reset) :电源电压低于安全阈值时产生。
外部复位 :外部引脚电平触发(手动复位按钮、外部监控芯片)。
看门狗复位(WDR, Watchdog Reset) :程序跑飞时自动复位。
软件复位 :通过软件指令主动触发复位。
 图 1 - 2:ADAS 电子控制单元系统框图,展示了复位信号在 PMIC、MCU、通信接口和各功能模块之间的分发关系。复位管理是保障功能安全(FuSa)的关键环节。来源:ROHM Semiconductor - ADAS ECU Solution
图 1 - 2:ADAS 电子控制单元系统框图,展示了复位信号在 PMIC、MCU、通信接口和各功能模块之间的分发关系。复位管理是保障功能安全(FuSa)的关键环节。来源:ROHM Semiconductor - ADAS ECU Solution
11.2 上电复位(POR)设计
11.2.1 POR 原理
上电复位确保 MCU 在电源电压稳定后才退出复位状态开始执行程序。如果 MCU 在电源未稳定时就开始运行,可能会导致不可预测的行为,如 PC 指针错误、寄存器值异常、Flash 读取错误等。
POR 电路通过监测电源电压的上升过程,在电压达到稳定工作范围后才释放复位信号。
 图 1 - 3:上电复位(POR)工作原理示意图。左侧为 RC 延时电路拓扑(Vcc→电容 C→电阻 R→GND),右侧展示了电源电压 Vcc 随时间上升的曲线以及复位引脚电压的变化过程。当复位引脚电压低于阈值 Vth 时,MCU 保持复位状态;当电容充电至 Vth 以上,复位释放,MCU 开始执行程序。来源:TechTarget - What is Power - On Reset (PoR)
图 1 - 3:上电复位(POR)工作原理示意图。左侧为 RC 延时电路拓扑(Vcc→电容 C→电阻 R→GND),右侧展示了电源电压 Vcc 随时间上升的曲线以及复位引脚电压的变化过程。当复位引脚电压低于阈值 Vth 时,MCU 保持复位状态;当电容充电至 Vth 以上,复位释放,MCU 开始执行程序。来源:TechTarget - What is Power - On Reset (PoR)
11.2.2 RC 延时复位电路
最简单的 POR 电路是 RC 延时电路,利用电容充电时间实现延时。
 图 1 - 4:RC 延时复位电路原理图。VCC 通过 100kΩ 上拉电阻连接 RESET 引脚,RESET 引脚通过 100nF 电容接地。二极管 D1 用于电源掉电时快速泄放电容电荷,确保下次上电时延时一致。该电路成本低,但受电源上升速度和 RC 容差影响较大。来源:Arduino Forum - RC reset circuit
图 1 - 4:RC 延时复位电路原理图。VCC 通过 100kΩ 上拉电阻连接 RESET 引脚,RESET 引脚通过 100nF 电容接地。二极管 D1 用于电源掉电时快速泄放电容电荷,确保下次上电时延时一致。该电路成本低,但受电源上升速度和 RC 容差影响较大。来源:Arduino Forum - RC reset circuit
延时计算公式为:t = -RC × ln (1 - Vth/VCC)
示例:R = 100kΩ, C = 100nF, VCC = 3.3V, Vth = 2.0V(复位释放阈值)
t = -100k × 100n × ln (1 - 2.0/3.3) = 10ms × ln (1/0.394) = 10ms × 0.928 = 9.28ms
即上电后约 9.3ms 复位信号释放,MCU 开始运行。
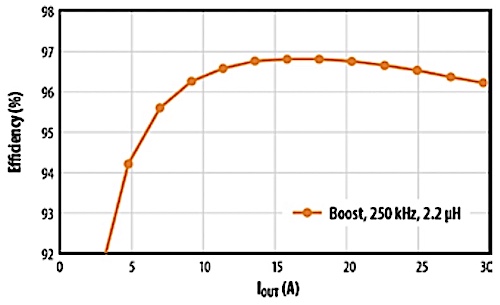
 图 1 - 5:示波器捕获的电源电压上升波形,展示了电源从 0V 上升至稳定工作电压(约 28V)的过程。上升时间约为数毫秒,期间存在轻微过冲。对于 RC POR 电路,需要确保 RC 延时大于电源上升时间,否则 MCU 可能在电源未稳定时退出复位。来源:Electrical Engineering Stack Exchange - Power supply slow rise time and ringing
图 1 - 5:示波器捕获的电源电压上升波形,展示了电源从 0V 上升至稳定工作电压(约 28V)的过程。上升时间约为数毫秒,期间存在轻微过冲。对于 RC POR 电路,需要确保 RC 延时大于电源上升时间,否则 MCU 可能在电源未稳定时退出复位。来源:Electrical Engineering Stack Exchange - Power supply slow rise time and ringing
 图 1 - 6:SoC 上电复位时序图。展示了高压电源、低压电源、Power_OK、系统时钟、RESET_B 以及复位引脚 OE/OD 状态的完整时序关系。RESET_B 在电源稳定且时钟就绪后延迟释放,确保 MCU 在完全准备好的环境下启动。来源:EDN - RESET definition and circuit implementation inside an Automotive ECU
图 1 - 6:SoC 上电复位时序图。展示了高压电源、低压电源、Power_OK、系统时钟、RESET_B 以及复位引脚 OE/OD 状态的完整时序关系。RESET_B 在电源稳定且时钟就绪后延迟释放,确保 MCU 在完全准备好的环境下启动。来源:EDN - RESET definition and circuit implementation inside an Automotive ECU
RC 电路的优点是简单、低成本。缺点是延时不精确(受电源上升速度和 RC 容差影响),且不能提供欠压保护。
11.2.3 专用复位芯片方案
对于车规级应用,推荐使用专用复位监控芯片(Supervisor IC),它能提供更精确的复位时序和多重保护功能。
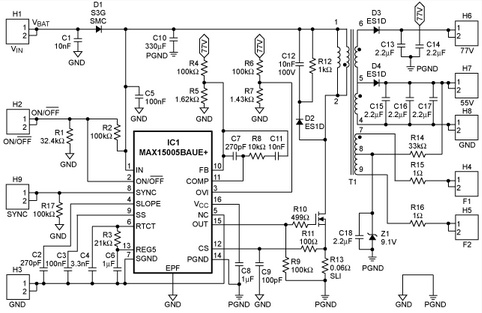
 图 1 - 7:RESET IC 工作原理与工作时序图。左侧为 RESET IC 在 DC - DC 与 MCU 之间的连接拓扑;右侧展示了过压检测(OV)和欠压检测(UV)的时序行为,包括检测延迟时间(Delay time)、释放延迟时间(tdelay)以及 MCU 的 OFF/POR = ON 状态切换过程。来源:MinebeaMitsumi - What is a RESET IC?
图 1 - 7:RESET IC 工作原理与工作时序图。左侧为 RESET IC 在 DC - DC 与 MCU 之间的连接拓扑;右侧展示了过压检测(OV)和欠压检测(UV)的时序行为,包括检测延迟时间(Delay time)、释放延迟时间(tdelay)以及 MCU 的 OFF/POR = ON 状态切换过程。来源:MinebeaMitsumi - What is a RESET IC?
器件型号阈值精度延时特点
TLV803 - Q1±1%200ms主动低推挽输出
MAX809T±1.5%240ms低功耗,SOT23 封装
TPS3808 - Q1±0.5%可编程高精度,窗口看门狗
专用复位芯片连接:
3.3V → 复位芯片 VCC
复位芯片 RESET → MCU RESET 引脚(低有效)
复位芯片 GND → GND
工作过程:
上电初期 VCC < Vth,RESET 输出低电平(MCU 复位)。
VCC > Vth 后,内部延时计数器开始计时。
延时结束(如 200ms)后,RESET 释放高电平。
MCU 退出复位,开始执行程序。
11.3 欠压复位(BOR)与看门狗
11.3.1 BOR 工作原理
欠压复位监测电源电压,当电压跌落到设定的 BOR 阈值以下时,立即将 MCU 复位,防止在低电压下发生不可预测的操作,如 Flash 写入错误、RAM 数据损坏等。
 图 1 - 8:欠压复位(BOR)电路示意图。该电路通过电阻分压或带隙基准监测 VDD 电压,当电源电压跌落至安全阈值以下时,比较器翻转输出低电平复位信号,将 MCU 强制复位,防止在低电压下执行不可靠操作。来源:Electrical Engineering Stack Exchange - Is Brownout Reset Circuit a standard or optional safety feature?
图 1 - 8:欠压复位(BOR)电路示意图。该电路通过电阻分压或带隙基准监测 VDD 电压,当电源电压跌落至安全阈值以下时,比较器翻转输出低电平复位信号,将 MCU 强制复位,防止在低电压下执行不可靠操作。来源:Electrical Engineering Stack Exchange - Is Brownout Reset Circuit a standard or optional safety feature?
 图 1 - 9:电压检测器的迟滞特性与工作时序图。上图展示了电源电压(VDD)与检测阈值(+Vdet、-Vdet)及迟滞区间的关系;下图展示了输出电压(Vout)在检测延迟时间(treset)和释放延迟时间(tdelay)内的状态变化,以及不稳定输出(Unstable Output)区域。来源:Nisshinbo Micro Devices - FAQs on voltage detector hysteresis
图 1 - 9:电压检测器的迟滞特性与工作时序图。上图展示了电源电压(VDD)与检测阈值(+Vdet、-Vdet)及迟滞区间的关系;下图展示了输出电压(Vout)在检测延迟时间(treset)和释放延迟时间(tdelay)内的状态变化,以及不稳定输出(Unstable Output)区域。来源:Nisshinbo Micro Devices - FAQs on voltage detector hysteresis
BOR 阈值设置:
典型 BOR 阈值 = MCU 最低工作电压 + 10% 裕量。
示例:MCU 工作范围 2.7V - 3.6V,BOR 阈值设为 2.8V(有些 MCU 内部可配置,范围 2.0V - 2.9V)。
迟滞电压约 50mV:低于 2.8V 复位,高于 2.85V 解除。
注意:BOR 阈值必须 > MCU Flash 写入最低电压,否则可能在写 Flash 时掉电,导致数据损坏。
11.3.2 看门狗定时器
看门狗定时器(WDT, Watchdog Timer)是一个独立的硬件定时器,MCU 必须在定时周期内 “喂狗”(刷新定时器),否则定时器溢出将触发系统复位。WDT 用于检测和恢复程序跑飞(死循环、PC 指针错误等)。
 图 1 - 10:看门狗定时器(WDT)内部结构框图。展示了 WDT Timer、PSA 预分频选择、8 - to - 1 MUX 多路选择器以及 Postscaler 后分频器的连接关系。WDT Enable Bit 控制定时器启停,超时信号最终输出至 MCU 复位逻辑。来源:Microcontrollers Lab - Watchdog Timer and Sleep Mode
图 1 - 10:看门狗定时器(WDT)内部结构框图。展示了 WDT Timer、PSA 预分频选择、8 - to - 1 MUX 多路选择器以及 Postscaler 后分频器的连接关系。WDT Enable Bit 控制定时器启停,超时信号最终输出至 MCU 复位逻辑。来源:Microcontrollers Lab - Watchdog Timer and Sleep Mode
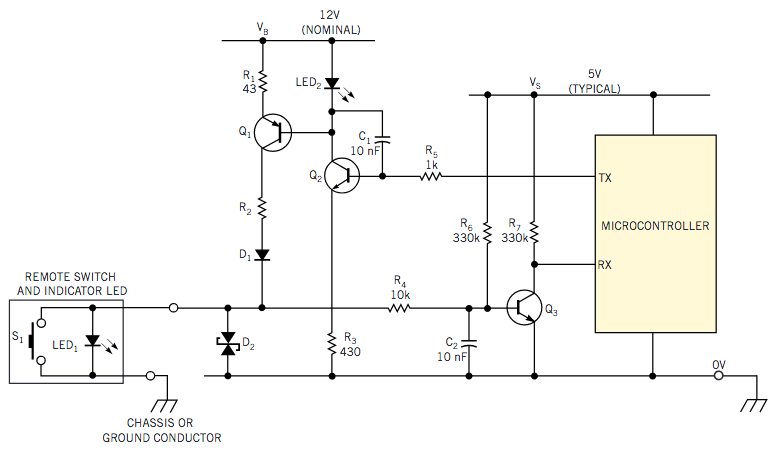
 图 1 - 11:汽车电子环境中的看门狗定时器应用示意图。左侧展示了 12V 电池、LDO、WDT、电压检测器(VD)与 MCU 的连接关系;右侧以形象化方式展示了 WDT 作为 “看门狗” 持续监视 MCU 操作的状态。来源:ABLIC Inc. - What is a watchdog timer (WDT)
图 1 - 11:汽车电子环境中的看门狗定时器应用示意图。左侧展示了 12V 电池、LDO、WDT、电压检测器(VD)与 MCU 的连接关系;右侧以形象化方式展示了 WDT 作为 “看门狗” 持续监视 MCU 操作的状态。来源:ABLIC Inc. - What is a watchdog timer (WDT)
看门狗配置要点:
复位(Reset)是 MCU 最基本也是最重要的功能之一。复位的作用是将 MCU 的所有寄存器恢复到初始状态,程序会从复位向量地址开始执行。可靠的复位电路是确保 ECU 在各种工况下稳定运行的基础。
图 1 - 1:ARM Cortex - M 复位向量表结构,展示了从初始 SP 值到各异常处理向量的地址映射关系。复位向量位于地址 0x00000004,MCU 上电后 PC 指针自动指向该地址开始取指令。来源:Microcontrollers Lab - Microcontroller Booting Process汽车 ECU 的复位源通常包括以下几类:
上电复位(POR, Power - On Reset) :电源首次上电时自动产生。
欠压复位(BOR, Brown - Out Reset) :电源电压低于安全阈值时产生。
外部复位 :外部引脚电平触发(手动复位按钮、外部监控芯片)。
看门狗复位(WDR, Watchdog Reset) :程序跑飞时自动复位。
软件复位 :通过软件指令主动触发复位。
图 1 - 2:ADAS 电子控制单元系统框图,展示了复位信号在 PMIC、MCU、通信接口和各功能模块之间的分发关系。复位管理是保障功能安全(FuSa)的关键环节。来源:ROHM Semiconductor - ADAS ECU Solution11.2 上电复位(POR)设计
11.2.1 POR 原理
上电复位确保 MCU 在电源电压稳定后才退出复位状态开始执行程序。如果 MCU 在电源未稳定时就开始运行,可能会导致不可预测的行为,如 PC 指针错误、寄存器值异常、Flash 读取错误等。
POR 电路通过监测电源电压的上升过程,在电压达到稳定工作范围后才释放复位信号。
图 1 - 3:上电复位(POR)工作原理示意图。左侧为 RC 延时电路拓扑(Vcc→电容 C→电阻 R→GND),右侧展示了电源电压 Vcc 随时间上升的曲线以及复位引脚电压的变化过程。当复位引脚电压低于阈值 Vth 时,MCU 保持复位状态;当电容充电至 Vth 以上,复位释放,MCU 开始执行程序。来源:TechTarget - What is Power - On Reset (PoR)11.2.2 RC 延时复位电路
最简单的 POR 电路是 RC 延时电路,利用电容充电时间实现延时。
图 1 - 4:RC 延时复位电路原理图。VCC 通过 100kΩ 上拉电阻连接 RESET 引脚,RESET 引脚通过 100nF 电容接地。二极管 D1 用于电源掉电时快速泄放电容电荷,确保下次上电时延时一致。该电路成本低,但受电源上升速度和 RC 容差影响较大。来源:Arduino Forum - RC reset circuit延时计算公式为:t = -RC × ln (1 - Vth/VCC)
示例:R = 100kΩ, C = 100nF, VCC = 3.3V, Vth = 2.0V(复位释放阈值)
t = -100k × 100n × ln (1 - 2.0/3.3) = 10ms × ln (1/0.394) = 10ms × 0.928 = 9.28ms
即上电后约 9.3ms 复位信号释放,MCU 开始运行。
图 1 - 5:示波器捕获的电源电压上升波形,展示了电源从 0V 上升至稳定工作电压(约 28V)的过程。上升时间约为数毫秒,期间存在轻微过冲。对于 RC POR 电路,需要确保 RC 延时大于电源上升时间,否则 MCU 可能在电源未稳定时退出复位。来源:Electrical Engineering Stack Exchange - Power supply slow rise time and ringing 图 1 - 6:SoC 上电复位时序图。展示了高压电源、低压电源、Power_OK、系统时钟、RESET_B 以及复位引脚 OE/OD 状态的完整时序关系。RESET_B 在电源稳定且时钟就绪后延迟释放,确保 MCU 在完全准备好的环境下启动。来源:EDN - RESET definition and circuit implementation inside an Automotive ECURC 电路的优点是简单、低成本。缺点是延时不精确(受电源上升速度和 RC 容差影响),且不能提供欠压保护。
11.2.3 专用复位芯片方案
对于车规级应用,推荐使用专用复位监控芯片(Supervisor IC),它能提供更精确的复位时序和多重保护功能。
图 1 - 7:RESET IC 工作原理与工作时序图。左侧为 RESET IC 在 DC - DC 与 MCU 之间的连接拓扑;右侧展示了过压检测(OV)和欠压检测(UV)的时序行为,包括检测延迟时间(Delay time)、释放延迟时间(tdelay)以及 MCU 的 OFF/POR = ON 状态切换过程。来源:MinebeaMitsumi - What is a RESET IC?器件型号阈值精度延时特点
TLV803 - Q1±1%200ms主动低推挽输出
MAX809T±1.5%240ms低功耗,SOT23 封装
TPS3808 - Q1±0.5%可编程高精度,窗口看门狗
专用复位芯片连接:
3.3V → 复位芯片 VCC
复位芯片 RESET → MCU RESET 引脚(低有效)
复位芯片 GND → GND
工作过程:
上电初期 VCC < Vth,RESET 输出低电平(MCU 复位)。
VCC > Vth 后,内部延时计数器开始计时。
延时结束(如 200ms)后,RESET 释放高电平。
MCU 退出复位,开始执行程序。
11.3 欠压复位(BOR)与看门狗
11.3.1 BOR 工作原理
欠压复位监测电源电压,当电压跌落到设定的 BOR 阈值以下时,立即将 MCU 复位,防止在低电压下发生不可预测的操作,如 Flash 写入错误、RAM 数据损坏等。
图 1 - 8:欠压复位(BOR)电路示意图。该电路通过电阻分压或带隙基准监测 VDD 电压,当电源电压跌落至安全阈值以下时,比较器翻转输出低电平复位信号,将 MCU 强制复位,防止在低电压下执行不可靠操作。来源:Electrical Engineering Stack Exchange - Is Brownout Reset Circuit a standard or optional safety feature? 图 1 - 9:电压检测器的迟滞特性与工作时序图。上图展示了电源电压(VDD)与检测阈值(+Vdet、-Vdet)及迟滞区间的关系;下图展示了输出电压(Vout)在检测延迟时间(treset)和释放延迟时间(tdelay)内的状态变化,以及不稳定输出(Unstable Output)区域。来源:Nisshinbo Micro Devices - FAQs on voltage detector hysteresisBOR 阈值设置:
典型 BOR 阈值 = MCU 最低工作电压 + 10% 裕量。
示例:MCU 工作范围 2.7V - 3.6V,BOR 阈值设为 2.8V(有些 MCU 内部可配置,范围 2.0V - 2.9V)。
迟滞电压约 50mV:低于 2.8V 复位,高于 2.85V 解除。
注意:BOR 阈值必须 > MCU Flash 写入最低电压,否则可能在写 Flash 时掉电,导致数据损坏。
11.3.2 看门狗定时器
看门狗定时器(WDT, Watchdog Timer)是一个独立的硬件定时器,MCU 必须在定时周期内 “喂狗”(刷新定时器),否则定时器溢出将触发系统复位。WDT 用于检测和恢复程序跑飞(死循环、PC 指针错误等)。
图 1 - 10:看门狗定时器(WDT)内部结构框图。展示了 WDT Timer、PSA 预分频选择、8 - to - 1 MUX 多路选择器以及 Postscaler 后分频器的连接关系。WDT Enable Bit 控制定时器启停,超时信号最终输出至 MCU 复位逻辑。来源:Microcontrollers Lab - Watchdog Timer and Sleep Mode 图 1 - 11:汽车电子环境中的看门狗定时器应用示意图。左侧展示了 12V 电池、LDO、WDT、电压检测器(VD)与 MCU 的连接关系;右侧以形象化方式展示了 WDT 作为 “看门狗” 持续监视 MCU 操作的状态。来源:ABLIC Inc. - What is a watchdog timer (WDT)看门狗配置要点:
超时时间设置 :典型值 50ms - 1000ms,应大于主循环最坏执行时间。示例:主循环最大执行时间 20ms,WDT 超时设 50ms(2.5 倍裕量)。
喂狗位置 :放在主循环的关键
0次
版权与免责声明
凡本网注明“出处:维库电子市场网”的所有作品,版权均属于维库电子市场网,转载请必须注明维库电子市场网,https://www.dzsc.com,违反者本网将追究相关法律责任。
本网转载并注明自其它出处的作品,目的在于传递更多信息,并不代表本网赞同其观点或证实其内容的真实性,不承担此类作品侵权行为的直接责任及连带责任。其他媒体、网站或个人从本网转载时,必须保留本网注明的作品出处,并自负版权等法律责任。
如涉及作品内容、版权等问题,请在作品发表之日起一周内与本网联系,否则视为放弃相关权利。

电路图分类
广告

热门电路图
最新电路图


