





MOS管驱动电路设计与电阻选型全解析
出处:网络整理 发布于:2026-06-09 14:10:36 | 67 次阅读
在电子电路设计中,驱动电路起着至关重要的作用,它能够为功率器件提供合适的驱动信号,确保其正常工作。下面将详细介绍驱动电路的核心结构、驱动电阻选型原则以及驱动芯片选型要点。
驱动电路核心结构
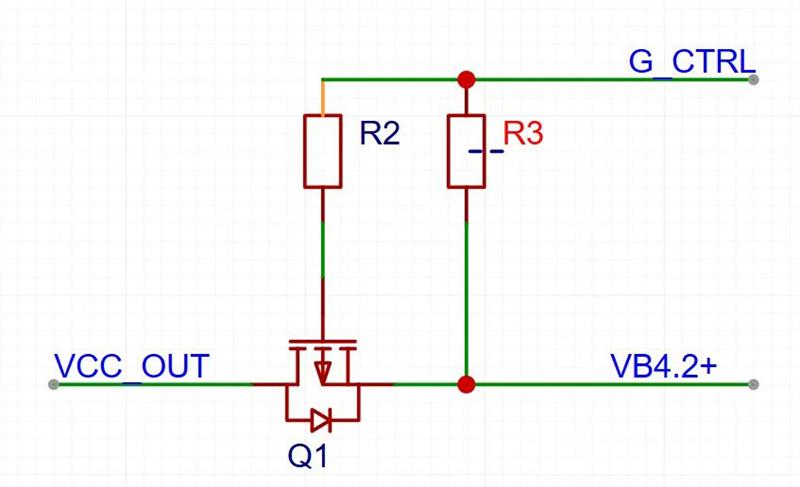
互补驱动架构:双 MOS 互补驱动采用上下管交替导通的方式,为了防止桥臂直通,中间设置了 0.5 - 2μs 的死区时间。高端驱动需要配置自举电路,典型参数为自举电容≥10 倍栅极电容,自举电阻为 10Ω,而低端驱动则直接接地。这种结构在半桥逆变器(工作频率为 50 - 200kHz)和 BLDC 电机控制器(PWM 占空比为 10 - 90%)中得到了广泛应用。
关键元件参数
Rg(驱动电阻):主要用于控制开关速度,典型参数范围是 5 - 100Ω。如果阻值过大,会导致损耗增加约 30%。
Rpd(下拉电阻):其作用是防止电荷积累,典型参数为 10kΩ±5%。若阻值过小,可能会引发误触发。
快恢复二极管:用于加速关断路径,要求反向恢复时间<20ns。如果反向恢复时间过长,可能会导致热失控。
 驱动电阻选型原则
驱动电阻选型原则
阻值范围计算
下限计算:基于阻尼比公式 Rmin = 2Lk/Cgs,其中 Lk 为回路电感(约 20 - 50nH),Cgs 为栅源电容(1 - 10nF)。例如,当 Lk = 30nH、Cgs = 3nF 时,通过计算可得 Rmin≈6.3Ω。
上限计算:依据误触发公式 Rmax <Vth/(Cgd?dV/dt),其中 Vth 为阈值电压(2 - 4V),Cgd 为栅漏电容(0.1 - 1nF)。当 dV/dt = 50V/ns 时,Rmax 需<80Ω。
性能平衡策略
EMI 抑制:使用 100Ω 电阻可以使 dv/dt 降至 5V/ns,但会使开关损耗增加 40%。
效率优化:采用 10Ω 电阻能够将损耗降低至 5mJ / 周期,但需要增加 RC 缓冲电路来抑制振铃。
实验调试:初始取值为理论值,然后逐步减小电阻值,直到波形出现震荡临界点,之后再乘以 1.2 倍作为最终取值。
驱动芯片选型要点
驱动电流:需要满足 Ipeak > Vdrive/Rg。例如,当驱动电压为 12V、Rg = 10Ω 时,芯片需要支持 1.2A 的峰值电流。
传输延迟:对于隔离型芯片(如 UCC21530),需要控制延迟差<50ns,以避免死区时间偏差>0.5μs。
驱动电路核心结构
互补驱动架构:双 MOS 互补驱动采用上下管交替导通的方式,为了防止桥臂直通,中间设置了 0.5 - 2μs 的死区时间。高端驱动需要配置自举电路,典型参数为自举电容≥10 倍栅极电容,自举电阻为 10Ω,而低端驱动则直接接地。这种结构在半桥逆变器(工作频率为 50 - 200kHz)和 BLDC 电机控制器(PWM 占空比为 10 - 90%)中得到了广泛应用。
关键元件参数
Rg(驱动电阻):主要用于控制开关速度,典型参数范围是 5 - 100Ω。如果阻值过大,会导致损耗增加约 30%。
Rpd(下拉电阻):其作用是防止电荷积累,典型参数为 10kΩ±5%。若阻值过小,可能会引发误触发。
快恢复二极管:用于加速关断路径,要求反向恢复时间<20ns。如果反向恢复时间过长,可能会导致热失控。
驱动电阻选型原则阻值范围计算
下限计算:基于阻尼比公式 Rmin = 2Lk/Cgs,其中 Lk 为回路电感(约 20 - 50nH),Cgs 为栅源电容(1 - 10nF)。例如,当 Lk = 30nH、Cgs = 3nF 时,通过计算可得 Rmin≈6.3Ω。
上限计算:依据误触发公式 Rmax <Vth/(Cgd?dV/dt),其中 Vth 为阈值电压(2 - 4V),Cgd 为栅漏电容(0.1 - 1nF)。当 dV/dt = 50V/ns 时,Rmax 需<80Ω。
性能平衡策略
EMI 抑制:使用 100Ω 电阻可以使 dv/dt 降至 5V/ns,但会使开关损耗增加 40%。
效率优化:采用 10Ω 电阻能够将损耗降低至 5mJ / 周期,但需要增加 RC 缓冲电路来抑制振铃。
实验调试:初始取值为理论值,然后逐步减小电阻值,直到波形出现震荡临界点,之后再乘以 1.2 倍作为最终取值。
驱动芯片选型要点
驱动电流:需要满足 Ipeak > Vdrive/Rg。例如,当驱动电压为 12V、Rg = 10Ω 时,芯片需要支持 1.2A 的峰值电流。
传输延迟:对于隔离型芯片(如 UCC21530),需要控制延迟差<50ns,以避免死区时间偏差>0.5μs。
0次
版权与免责声明
凡本网注明“出处:维库电子市场网”的所有作品,版权均属于维库电子市场网,转载请必须注明维库电子市场网,https://www.dzsc.com,违反者本网将追究相关法律责任。
本网转载并注明自其它出处的作品,目的在于传递更多信息,并不代表本网赞同其观点或证实其内容的真实性,不承担此类作品侵权行为的直接责任及连带责任。其他媒体、网站或个人从本网转载时,必须保留本网注明的作品出处,并自负版权等法律责任。
如涉及作品内容、版权等问题,请在作品发表之日起一周内与本网联系,否则视为放弃相关权利。
电路图分类
广告

热门电路图
最新电路图


