





智能移动机器人跟踪系统应用研究与设计
出处:qinhecat 发布于:2012-03-08 09:19:55
1 引言
智能机器人是人工智能与机器人学的交叉研究领域,而机器人的智能控制则是智能控制的重要应用研究领域。由于移动机器人控制系统具有非线性、不确定、多任务、多因素、多层次等因素而属于复杂系统,因此只借助于数学模型描述和分析的传统控制理论难以解决其中的控制问题。
智能控制所要解决的控制问题,从宏观上看不再限于传统自动控制的恒值调节和跟踪控制,而是针对复杂对象、目标、环境的控制,包括规划、管理、组织、协调、决策、指挥、通信等,如何有效地拟人的智能活动机理,将智能控制和运动控制方法结合起来根据机器人视觉检测与跟踪的世界模型去建立控制模型解决其中的任务分配,寻找一种既具有检测识别性能高,又对移动目标进行快速平滑的自动跟踪的智能控制与识别方法,并能进行实际应用是值得研究的课题。
2 移动机器人视觉检测与跟踪控制的世界模型
在对运动目标检测识别与驱动控制过程中,拟人监控过程是根据运动目标的模式特征信息,通过识别判断,在线确定或变换驱动控制策略,从而对监控的运动目标进行跟踪。移动机器人视觉检测识别和跟踪控制系统功能较多,任务比较复杂,结构包括:(1)全景视觉和近景视觉的提取;(2)方位控制和距离控制;(3)红外防撞测量与控制;(4)速度反馈与控制;(5)信息处理。系统的任务结构如图1 所示。系统设计必须满足监控系统的实时性和可靠性,同时考虑到识别与控制过程的灵活性和适应性,实现目标模式灵活监测和实时跟踪控制策略,以适应结构化或非结构化、熟悉或不熟悉的环境,自主地执行监控任务。
采用传统结构控制方法很难处理好这样的复杂任务,必须有效模拟人的智能活动机理,将人类的视觉认知方式和运动控制方法结合起来进行解决。
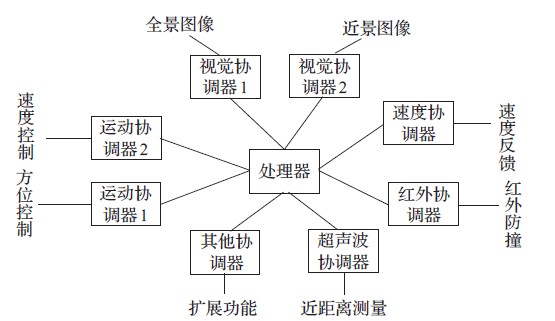
图1 移动机器人系统的任务结构图
维库PDF:智能移动机器人跟踪系统应用研究与设计.rar
版权与免责声明
凡本网注明“出处:维库电子市场网”的所有作品,版权均属于维库电子市场网,转载请必须注明维库电子市场网,https://www.dzsc.com,违反者本网将追究相关法律责任。
本网转载并注明自其它出处的作品,目的在于传递更多信息,并不代表本网赞同其观点或证实其内容的真实性,不承担此类作品侵权行为的直接责任及连带责任。其他媒体、网站或个人从本网转载时,必须保留本网注明的作品出处,并自负版权等法律责任。
如涉及作品内容、版权等问题,请在作品发表之日起一周内与本网联系,否则视为放弃相关权利。
- 直流电动机的工作原理/直流发电机的工作原理2025/8/11 17:07:01
- 工业充电器隔离式 DC - DC 功率级拓扑结构选型基础2025/8/11 16:41:27
- 单相异步电动机是什么?具有什么特征?2025/8/8 16:42:39
- IGBT 短路振荡机制的深度解析2025/8/8 16:16:56
- 工业充电器隔离式 DC - DC 功率级拓扑结构选型全解析2025/8/7 16:40:14



